当前课程知识点:水下声信道 > 学习资料 > 声学的基础知识 > 探索海洋,我们即要千里眼,也要顺风耳
水声的物理特性
声音在水中以纵波传播,表现为一簇压力面的移动。这些波阵面在水中以特定的速度移动,这一移动速度即声速。声音的局部速度随着水的特性如盐度、压力和温度而变化,但它与声音本身的特性无关。在典型的海洋环境中,声速约为1500(m/s)。
声波中压力波阵面之间的物理距离是它的波长。每单位时间通过水中静止点的波阵面的数量就是波的频率。波长(如果以米为单位)和频率(如果以赫兹为单位)通过声速(以米/秒)为单位)相互关系为,声速=频率×波长
当声波遇到局部声速的变化时,它的波长会改变,但频率保持不变。由于这个原因,声波通常是根据它们的频率来描述的。
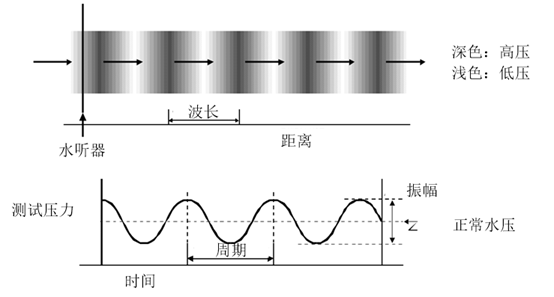
声波携带一定量的声能。这种能量可以通过一种叫做水听器的装置来测量,这种装置可以在声波通过时测量声压的振荡。这些振荡的大小就是波的振幅。振幅与波中传播的声能有关——振幅越高,波的能量越高。从数学上讲,声波每单位时间的能量(称为功率)与其振幅的平方成正比。
下图示意性地显示了声波的传播过程。颜色深浅代表声波传递过程中的压力等级,深色阴影对应于高压,浅色阴影对应于低压。两个高压波面之间的距离就是波长。
声波在水中传播时,会损失一些能量。发生这种情况是因为水分子之间的压力差传递不是100%有效的——这些能量因为产生的热量而损失。声波衰减时,其振幅就会减小。
前面说到声波可用于水下遥感技术,一方面是因为某些频率声波可以传播数百公里而没有明显的衰减。另一方面是因为光波和无线电波(用于地面雷达)只能穿透几米水深就几乎全部衰减了。声波的衰减程度取决于其频率——高频声音衰减很快,而极低频声音几乎可以不受阻碍地在海洋中传播。据测,典型的12千赫声纳发出的声波在水中传播3000米时才会衰减一半能量。
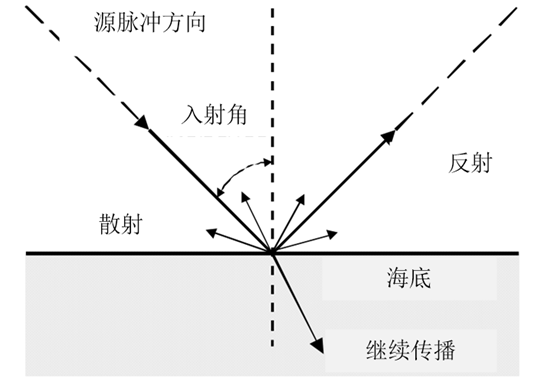
虽然声波能在水中很好的传播,但它会被介质(诸如岩石或沙子等)的突然变化所打断。当一个行进的声波脉冲遇到这样的介质时,它的一部分能量会传播到新介质中。传输多少能量取决于许多因素,包括新介质的阻抗(材料密度和内部声速的乘积)、声波脉冲的入射角(声音脉冲到达新介质的角度)以及新介质表面的粗糙度。没有传递到新介质中的能量则以声音的形式回到原始媒介——水中。它的一部分被介质表面反射——本质上它是以一个取决于入射角的方向反射的。其余的分散在各个方向。多少能量进入反射,多少能量进入散射取决于材料的特性和入射角。返回水中的能量(换句话说,没有传递到新介质中的能量)被称为回声。回声保持了源波的频率特性。下图显示了海底回声的过程。
声呐的原理
声纳是一种利用声音远程探测和定位水中物体的装置。它通过利用声音在水中的传递特性来实现。声纳有两种基本类型:被动声纳和主动声纳。
被动声纳本质上是记录水中物体发出的声音的“听”设备。这种仪器可以用来探测地震、船只、潜艇和海洋生物——任何能自己发出声音的东西。
主动声纳又称有源声纳,是一种能产生特定受控频率声波,又可以监听水中远程物体发出的回声的装置,用于测量海洋深度的声纳是主动声纳,也叫回声测深仪。
回声测深仪通过产生一个短的声音脉冲,或称“Ping”,然后监听从海底返回的回声脉冲来测量深度。脉冲传输和回波返回之间的时间是声音到达海底和返回的时间。知道了这个时间和水中的声速,就可以计算到海底的距离。例如,如果从发送ping到听到它的回声需要10秒钟,那么使用1500米/秒的声速,您就知道它行进了10s×1500 m/s = 15000米。因为这是“往返”距离,所以到海底的距离是15000米的一半,也就是7500米。一般来说:距离=1/2(声速×声波往返时间),当然,这只是一种理想状况。
为了产生声波,回声测深仪使用一种叫做发射器的设备。发射器可以是任何能够在水中发出声音的东西,有多种形式。有一种类型的发射器系统是在水下引爆炸药,这种装置使用高能放电产生等离子气泡。另外一种类型的气枪震源系统使用压缩空气在水下瞬间释放制造压力波。这些设备主要用于海底地震勘测。它们都有一定的局限性,因为它们产生的声音脉冲的振幅、频率和持续时间不能保持可重复的一致性。
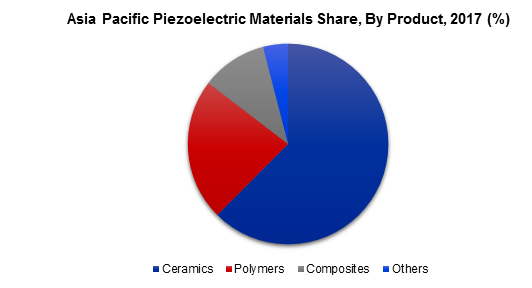
测深声纳需要能够重复产生具有精确、可控和可重复特征的声脉冲的发射器。他们使用由压电陶瓷构成的发射器,压电陶瓷是一种在施加电压时会微小改变尺寸的材料。回声测深仪可以使用特定频率的电压使压电发射器振荡,将具有特定频率特性的压力波传输到水中。这种发射器可以简单地理解为类似普通的扬声器,它将电信号转换成布或纸薄膜的振动,以声波的形式将能量传输到空气中。
压电陶瓷只是压电材料的一种,此外还有压电聚合物、压电复合物等
© 互联网
在水中产生的声波脉冲从它的源头开始以球形发散——它的能量向各个方向均等传播。当波前的范围慢慢扩大时,它的能量被分散到越来越大的区域(扩大的球体表面),导致单位面积能量下降,这种能量下降称为扩散损耗。声波脉冲也同时也会遭受一些水的衰减或吸收损耗。总的来说,扩散损耗和吸收损耗被称为传输损耗。影响声波的传输损耗取决于声波传播的距离,声波传播得越远,它的传输损耗就越大,声波就越弱。
当声波传播到海底时,就像光照亮海底似的。被照亮的这一点上声能的变化非常复杂。一部分能量被传输到海底,传输多少能量取决于底部材料,沙子和淤泥很容易吸收能量,岩石和金属物体吸收的声能很少,没有被吸收的大部分能量被反射或散射回水中。每单位面积的入射能量中被反射回发射器方向的部分称为海底的后向散射强度。
回声离开海底后,返回的声波脉冲会发生更多的传输损耗。回声测深仪使用水听器探测回波脉冲的剩余部分能量。水听器的作用与发射器相反——它们将声波返回到达时的物理振荡转化为电压。水听器类似于麦克风,它们将声音转换成电信号。由于功能的相似性,声纳系统中的发射器和水听器通常是相同的硬件,叫做换能器。
在上述过程的每一个阶段——Ping产生、传播、返回和接收——都有不同来源声音加入到最终接收到的信号中。这些声音包括但不限于海洋声音(例如海浪)、海洋生物以及来自测量船和其他船只的声音。总的来说,这些不需要的声音信号电平被称为噪声级。噪音级限制了任何遥感仪器的最大测量范围。在一个没有噪音的世界里,可以探测到海底最小的声纳回波。虽然Ping及其回波的传输损耗使它们越来越弱,但它们实际上从未降至零。然而,在真实、嘈杂的世界中,它们最终会变得非常微弱,以至于无法与噪声级区分开来,因此无法被检测到。信噪比是接收信号强度与噪声级的比值,它给出了信号可检测性的量度。
声呐方程
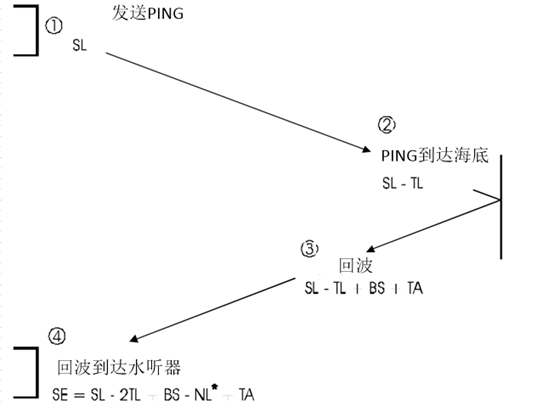
人们经常使用声纳方程描述声学过程中涉及的所有因素。这个等式表示所谓的信号余量(SE),即测量回波的强度,用上述量表示——传输损耗(TL)、后向散射强度(BS),在探测诸如水雷或潜艇之类的离散目标时通常称为目标强度、目标阈(TA)和噪声级(NL)。它还包括声源级(SL),这是一个测量发射器在水中传递声能的数量的方法。按照惯例,所有数值都以分贝(dBs)为单位:
SE = SL - 2TL + BS - NL+ TA
信号余量=声源级-2×传输损耗+后向散射强度-噪声级+目标阈
声纳方程可以以不同的形式出现,并且可能有附加项。它清楚地代表了回声测深中涉及的许多因素以及它们之间的相互关系。因此,声纳方程在设计过程中或在许多“假设”情况下预测性能时很有用。下图示意了沿着从发射器到海底再到水听器的路径,表示了声纳方程的每个元素的含义。
资料来源于公众号:深海智人,相关资料链接https://mp.weixin.qq.com/s/-j6ANTKpB_J_fB2Zxpgl3g
-1.1 引言
--1.1 引言
-1.1 引言作业
-1.2声呐系统和声信道模型
-1.2声呐系统和声信道模型作业
-2.1 平均能量信道概述
--平均能量信道概述
-2.1 平均能量信道概述作业
-2.2 海水中的声速
-2.2 海水中的声速作业
-2.3 海水中的声吸收、海洋环境噪声
-2.3 海水中的声吸收、海洋环境噪声作业
-2 .4 海底反射损失
-2 .4 海底反射损失作业
-2.5 分层介质中的射线声学
-2.5 分层介质中的射线声学作业
-2.6 等梯度水层中的声线和声场
-2.6 等梯度水层中的声线和声场作业
-2.7 深海声传播方式与扩展损失
-2.7 深海声传播方式与扩展损失作业
-2.8.1 浅海的PEKERIES模型
-2.8.1 浅海的PEKERIES模型作业
-2.8.2 浅海的PEKERIES模型(二)
-2.8.2 浅海的PEKERIES模型(二)作业
-3.1 相干多途信道概述
-3.1 相干多途信道概述作业
-3.2 相干多途信道系统函数
-3.2 相干多途信道系统函数作业
-3.3 相关器和匹配滤波器
-3.3 相关器和匹配滤波器作业
-3.4 信号模糊度函数
-3.4 信号模糊度函数作业
-3.5 拷贝相关器在相干多途信道中的响应
-3.5 拷贝相关器在相干多途信道中的响应作业
-3.6 自适应相关器
--自适应相关器
-3.6 自适应相关器作业
-3.7 自适应相关器在相干多途信道中的响应
-3.7 自适应相关器在相干多途信道中的响应作业
-3.8 相干多途信道中的互相关
-3.8 相干多途信道中的互相关作业
-3.9.1 时间反转镜技术原理
-3.9.1 时间反转镜技术原理作业
-3.9.2 时间反转镜技术分类
-3.9.2 时间反转镜技术分类作业
-4.1 随机时变空变信道理论基础
-4.1 随机时变空变信道理论基础
-4.2 随机声场的一般概念和描述
--4.2 声信号起伏作业
-4.3 时变信道的系统函数
-4.3 时变信道的系统函数作业
-4.4 随机时变信道的系统函数
-4.4 随机时变信道的系统函数作业
-4.5.1 广义平稳信道WSS信道、非相关散射信道US信道(一)
--4.5.1 广义平稳信道WSS信道、非相关散射信道US信道(一)
-4.5.1 广义平稳信道WSS信道、非相关散射信道US信道(一)作业
-4.5.2 广义平稳信道WSS信道、非相关散射信道US信道(二)
--4.5.2 广义平稳信道WSS信道、非相关散射信道US信道(二)
-4.5.2 广义平稳信道WSS信道、非相关散射信道US信道(二)作业
-4.6.1 广义平稳非相关散射信道WSSUS
-4.6.1 广义平稳非相关散射信道WSSUS
-4.6.2 匹配滤波器在WSSUS信道中的响应
-4.7 散射函数
--4.7 散射函数
-4.7 散射函数作业
-4.8 相干函数
--4.8 相干函数
-4.8 相干函数作业
-5.1 缓慢时变信道的相干多途信道
-5.1 缓慢时变信道的相干多途信道作业
-5.2.1 散射函数实验结果(一)
-5.2.1 散射函数实验结果(一)作业
-5.2.2 散射函数实验结果(二)
--Video
-第五章 缓慢时变的相干多途信道--5.2.2 散射函数实验结果(二)
-5.3 信道相干性的测量方法
-第五章 缓慢时变的相干多途信道--5.3 信道相干性的测量方法
-5.4.1 相干信道中运动声源的系统函数(一)
-第五章 缓慢时变的相干多途信道--5.4.1 相干信道中运动声源的系统函数(一)
-5.4.2 相干信道中运动声源的系统函数(二)
-第五章 缓慢时变的相干多途信道--5.4.2 相干信道中运动声源的系统函数(二)
-5.5 目标运动时互相关的损失
-第五章 缓慢时变的相干多途信道--5.5 目标运动时互相关的损失
-6.1 混响信道概述
-6.1 混响信道概述--作业
-6.2 混响的平均特性
-第六章 混响信道--6.2 混响的平均特性
-6.3 混响的散射函数
-第六章 混响信道--6.3 混响的散射函数
-6.4 混响的多普勒特性
-第六章 混响信道--6.4 混响的多普勒特性
-6.5 混响的统计特性&抗混响
-第六章 混响信道--6.5 混响的统计特性&抗混响
-7.1 目标信道
--7.1 目标信道
-第七章 主动声呐目标信道--7.1 目标信道
-7.2 相干目标信道与多亮点模型
-第七章 主动声呐目标信道--7.2 相干目标信道与多亮点模型
-《水下目标探测研究现状与展望》
--2020青岛海科展开幕,全球首款探鱼无人机、万米海底观测地震等神器首次亮相
-世界各国深海探测技术发展现状
-声学的基础知识
--信道模型
--声学发展简史
-水声领域相关知识
-- 蛙人探测声呐系统发展综述
--海洋技术▏三维激光技术在水下大坝与门槽结构精密检测中的应用
--黑科技,世界上功率最大的海底铺管机器人,堪比七辆重型卡车!
--美国海军推进15个水下技术领域:从无人航行器到先进武器系统
-发展新型声纳系统的几个科学问题
-开学第一课,西湖大学校长施一公给你讲
-人民海军——生日快乐
--人民海军生日快乐
-三维图解台湾地形:控制日本和韩国咽喉的要地!台湾位置有多重要”
--三维图解台湾地形:控制日本和韩国咽喉的要地!台湾位置有多重要?
-FMCW雷达角度估计
-055一体化桅杆简洁隐身的背后——代表一流综合射频技术
-中国工程院发布“中国电子信息工程科技发展十六大挑战”。
-目标跟踪基础知识:角跟踪技术
-美国提出“侦察威慑”概念——无人机将在大国对抗中发挥关键作用
--美国提出“侦察威慑”概念——无人机将在大国对抗中发挥关键作用
-水声信号处理相关学习资料
--简述计算机三大变换的联系和区别 (傅里叶变换、拉普拉斯变换、z变换)
-“MIT教授Gilbert Strang最新《线性代数》课程”
--“MIT教授Gilbert Strang最新《线性代数》课程”
-俄 “琴弦-1”多基地雷达可以发现隐身目标
-美国最先进核潜艇被逆向工程以后......
-英国推进海上无人平台指挥控制能力发展
-雷达基础知识
-欧洲水下声通信技术发展综述
-热点前沿国际动态
--热点|马斯克的星际飞船爆炸1天后,SpaceX龙飞船载人首飞成功,创造历史