
当前课程知识点:水下声信道 > 学习资料 > 水声领域相关知识 > 水声技术▏许肖梅:水声通信与水声网络的发展与应用
一、引言
海洋蕴藏着丰富的资源,实现海洋观测、资源勘探与开发是当前各海洋国家最为关注的问题之一。近年来,水声通信与水声网络由于在海洋信息应用领域的不断扩大而取得了很大的进步。军事上,网络化水声通信技术不断显示出其在海洋军事情报的监听与收集、港口及近岸水域的监测、特别是水下侦察与多节点协作探测、集群管理指挥与调度等方面的重要性。当前海洋监测范围的扩大和水下武器系统多样化发展趋势迫切要求水声通信在性能上能传得更快、更远,能更加准确有效地抵抗外部干扰。民用上,海洋环境与气象研究、海洋资源开发与保护、港口安全与监测效率的提高等大量应用各种水下传感器的工作环境也要求网络化的水下通信监控和管理。
近20年来,高速率、高可靠性水声通信技术的实现,使水声网络研究目前已成为水声通信领域中一个研究热点。水声网络的实现需要基于高可靠性点对点物理层水声通信技术,开展多点组网,达到信息互通、共享的目的,同时通过无线浮标将上传的数据接入陆地上现有的立体信息网中,可形成真正意义上的覆盖全球的立体信息网。
二、水声信道对声传输影响
目前水声通信与水声网络的实际性能极大地偏离了人们从理论分析期望上所能达到的理想效果,最主要的原因还在于声在水下传播时所面临的实际信道情况远非人们通常所用的理论分析或实验室仿真时所做出的种种信道假设条件。
水声信道是迄今为止难度最大的无线通信信道之一。由于水下声传播速度缓慢、海水对声的吸收和海水介质的复杂、多变性,都将对水声信号产生严重干扰,特别是浅海信道中存在的强多途和大信号起伏等给水声通信系统的设计提出了许多技术挑战。如何克服多途干扰、时频和多普勒扩展、时变衰落,是水声通信技术中需要重点解决的问题。
水声信道复杂性表现为随机起伏的海面;随机、非均匀、非静止的海水介质及其分布的气泡层;不同尺度的冷暖水团;层流、湍流、内波及涡流;分散式的不均匀体,如鱼群、浮游生物等;声速的随机时空变化;随机不平整的海底;各种海洋噪声:如波浪、风雨、船舶噪声、生物噪声等等,由此构成了海洋介质的复杂性。
多变性表现在:⑴时变性。有小尺度时变性,如表面波浪:弱风(1~3s)、中风(8~10s)、强风(20~30s);内波:浅海(几分钟至数十分钟)、深海(数十分钟至数小时);湍流(102~10-2s)。中尺度,内波等(数小时至数天);天气尺度、涡、峰等(数天至数月);季节尺度:声速剖面、混合层厚度、季节变化。⑵空变性。水深、声速分布、海底特性与地形;不同的非均匀体:生物、气泡。因此,声学声场结构等因地而变,如多途结构的空间变化。⑶频变性。不同的频率,声传播有着不同的衰减,产生严重的此起彼伏的谱特性。
⑴强多途。两类多途:海面、海底反射的“宏观”多途(浅海更强烈);折射形成的“微观”多途(深海更明显)。信号起伏:直达与多途叠加、多普勒频移。⑵有限频带:因为吸收效应的存在而使得不同传输距离有着不同的频带宽度。
由于水声信道的复杂、随机多变等特性,虽然水声通信是人们普遍接受的水中通信方式,但直到目前还没有商业化的水声通信系统能同时满足人们对通信距离、通信速率、通信可靠性、通信方向(水平或垂直信道)、信息传输形式等五方面的要求。
三、水声通信
水声通信技术诞生于上世纪中叶,和其他信号处理技术的发展趋势相同,水声通信技术经历了从最初的模拟通信阶段到现今的数字通信过程。上世纪80年代,水声通信主要以非相干的FSK调制等技术为主,近十几年来,在高速水声通信技术上已由非相干通信向相干通信发展。
非相干水声通信方式通常采用移频健控即MFSK调制信号,接收端采用基于能量检测的非相干检测方法。为了抗水声多途干扰,非相干通信方式常与水声跳频技术结合,构成水声跳频通信方式。水声跳频通信方式具有结构相对简单,可适应于不同的水声信道,不需要复杂的自适应信道均衡技术,可以在较低信噪比下,实现低误码率的数据传输等性能特点。因此,该通信方式在浅海、深海中都得到了广泛的应用。如美国Datasonic公司(后被Benthos公司收购,Benthos目前已被Teledyne所收购)生产的ATM850(也称第一代水声Modem),常用频率10kHz,带宽5kHz,最高传输速率为1200bps,最远距离为10km。ATM875(第二代水声Modem)、ATM885(第三代水声Modem)以及目前正在研制的第4代水声Modem均采用非相干通信方式(其中第4代水声Modem也用到相干通信方式)。非相干通信方式在抗强多途干扰、大信号起伏和低信噪比上具有明显的优势,同时采用跳频通信在水声组网中具有易于实现码分多址等特点。但其存在的主要缺点是带宽利用率较低,很难获得高速率的数据传输速率,一般只有几百bps。
Benthos公司采用的典型的多信道“MFSK”信号发射方式如图1所示。该发射信号可在带宽5.12kHz内同时发射32个频率子带。另加两个子带用于信道Doppler跟踪,其他的子带用于发射数据信息。数据传输速率从140bit/s到2400bit/s之间变化。在此发射信号方式中采用了信号捕获、信道测试的几种信号预处理方法,特别是小功耗的DSP板(见图2,第4代水声Modem板)能稳定工作在高速运动的平台上。
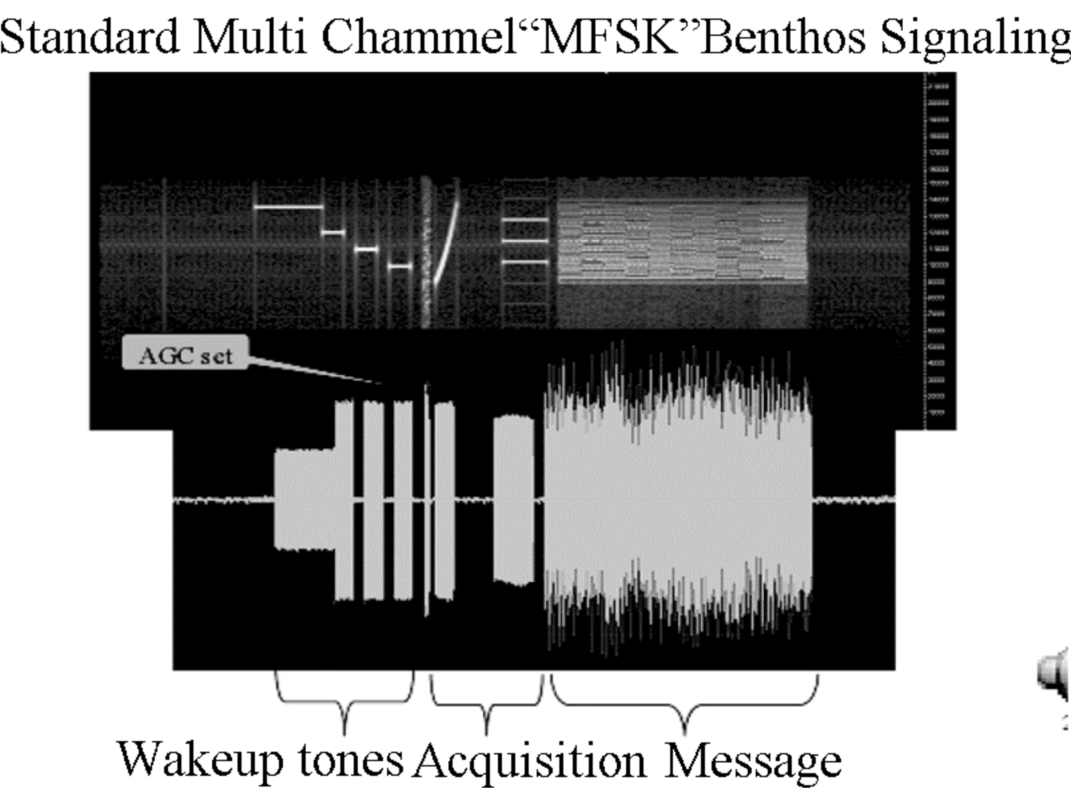
图1 Benthos公司的多信道“MFSK”信号方式
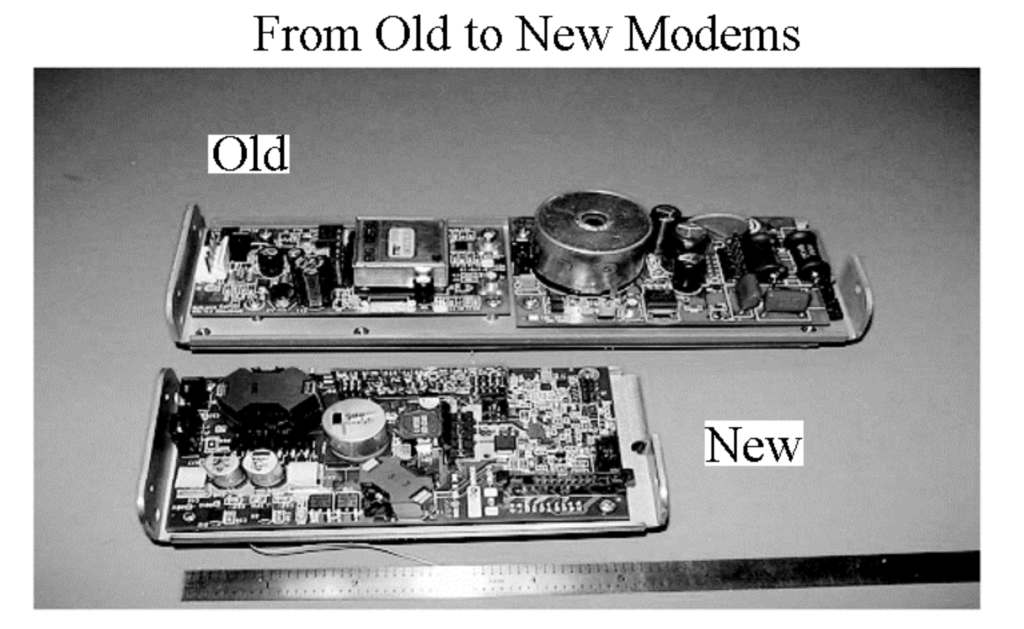
图2 Benthos第3代和第4代(2008)水声Modem
图1中Modem发射信号设计分为唤醒、获取和信息3个部分。其中,信号唤醒频率设置较为灵敏,用于唤醒水声网络各节点开始工作,后面紧跟着几个由不同频率组成的ID码信号;接下来为AGC信号用于对信道响应进行测试;信号捕获部分为线性调频LFM信号(用于接收端相关检测峰值同步的捕获)以及Benthos公司专利产品“多频点Doppler频移测试信号”。信息部分由跳频序列组成调制信号。图3为LFM同步信号淹没在噪声中和采用相关处理后接收到的信号相关峰,相关峰值可指出信号到达时间,但当平台相对运动时,相关峰值在幅度和时间上波形失真严重,需构建一个捕获-同步多路滤波的子系统,或采用时-频同步方法进行非相干通信中的同步设计。
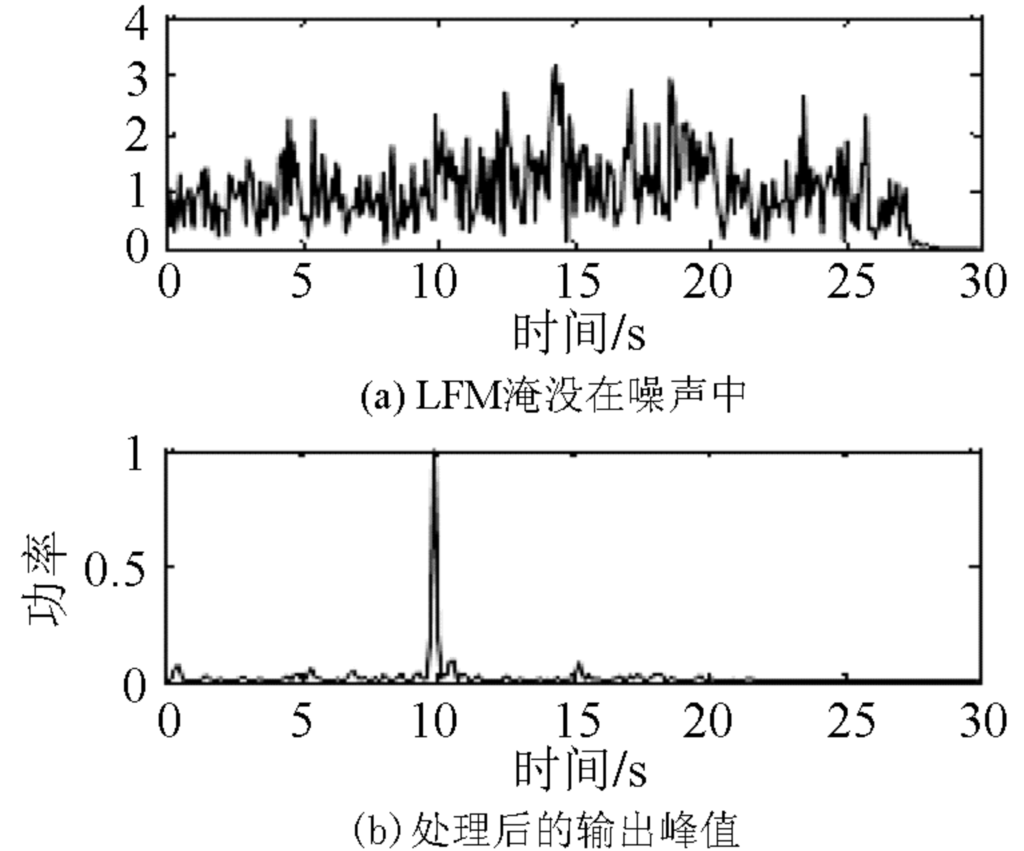
图3 LFM同步信号接收
图4为美国Benthos公司和美国WHOI海洋研究所的跳频图案声谱比较。
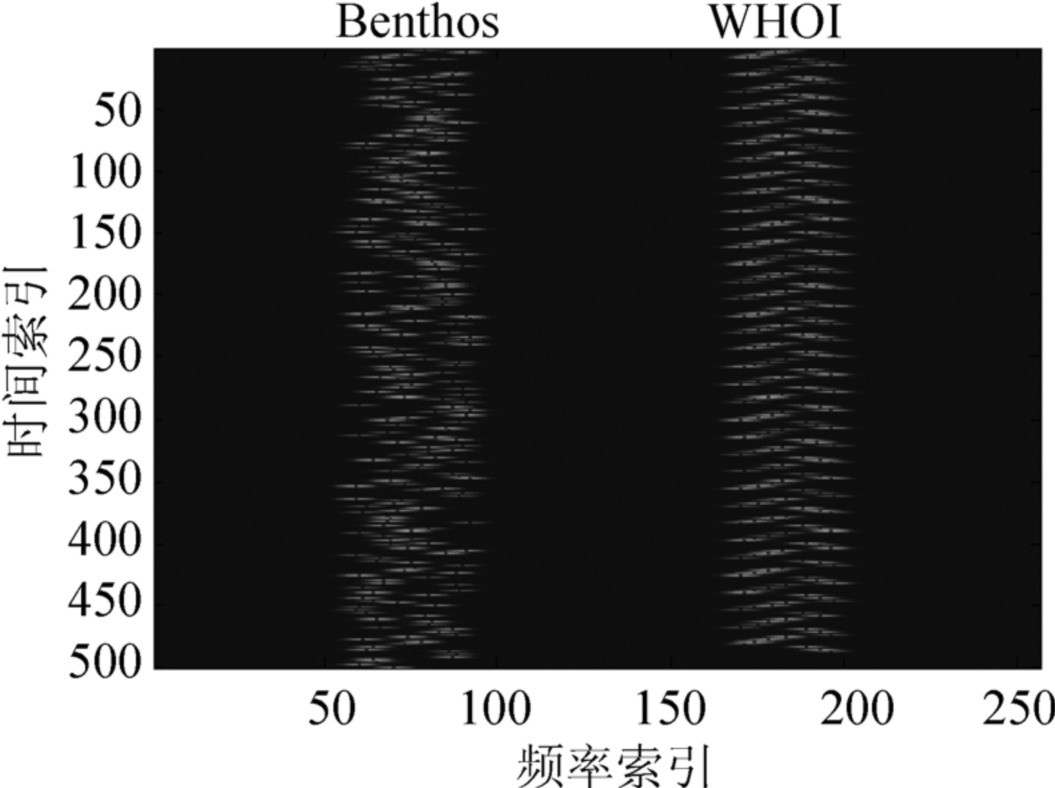
图4 跳频系统中Benthos和WHOI的跳频图案声谱比较
厦门大学在浅海水声跳频通信技术上有十多年的研究经验,在浅海快速同步捕获技术上取得了一些的成果。
在高速率水声通信上一般采用相干通信方式。发送端发送相移健控即MPSK调制信号,接收端采用二阶数字锁相环和自适应均衡器进行接收,可以获得比非相干方式高得多的数据传输速率。相干水声通信的高速率是以接收端软、硬件的高复杂性为代价的。由于水声信道的多途干扰及其时变特性,需要采用复杂的自适应信道均衡技术。目前主要有线性均衡器(LE)和判决反馈均衡器(DFE)两种信道均衡技术。自适应算法也有两种,即LMS算法和RLS算法。两种均衡器和自适应算法各具优缺点,其性能及收敛特性与水声信道的相干时间、多途结构等有关。除自适应信道均衡技术外,相干水声通信方式还要进行相位估计和补偿、多普勒频移估计和补偿、载波信息的提取等。为了提高接收增益,进一步降低系统的误比特率,在复杂的水声衰落信道中目前还采用MIMO方式,即发送端采用多个换能器组成的阵列进行发射声信号,接收端也采用水听器阵进行接收。除了高复杂性外,相干水声通信方式的其他缺点还包括信道适应能力较差、要求信道的相干时间长和较高的接收信噪比等。
目前世界上尚无通用的水声相干通信机产品,仅有使用于某些特定信道下的样机产品。如美国Linkquest公司UWM系列产品,主要适用于垂直水声信道;美国佛罗里达亚特兰大大学采用并行多普勒补偿的自适应反馈均衡器和BCH码级联技术及小波声图像压缩技术,其于2007年研制的浅海海底图像传输单载波相干水声通信机,中心频率300kHz,最大带宽75kHz,最高传输速率88kbit/s,作用距离88m。
随着硬件水平、信号处理能力的不断提高,水声通信的调制方式、信号处理算法等都在逐渐使用各种新的、复杂的技术,如空间调制技术、自适应均衡技术、盲均衡技术、分集接收技术等。近年来,OFDM通信方式也开始应用于水声高速数据通信系统中,取得了较大的数据速率与通信距离积。
OFDM通信方式的主要缺点是调制信号的峰均比值较大,接收端需要有较大的信噪比才能获得可靠的数据传输,其他技术如MIMO和时反水声通信技术等也在不断发展和完善之中。
无论非相干、相干,还是OFDM通信方式,要获得满足水声通信工程应用需求的误码率,通常都需要采用信道纠错编码技术。在AWGN信道下,Turbo码和LDPC码是两种几乎接近香农理论极限的纠错编码方式。图5给出该两种纠错编码的性能比较结果。可见,规则、非规则二进制LDPC码、规则16进制LDPC码的性能较Turbo码差,但非规则8进制LDPC码的性能却较Turbo码要好。与LDPC码比较,Turbo码的主要优点是编码过程比较简单、码率固定(1/2或1/3)、在码长较小的情况下就具有较好的性能。将Turbo译码器与自适应均衡器级连,可构成Turbo均衡器结构等。与Turbo相比,LDPC码的优点是码率可以任意设置、译码算法比较简单、码长较大时性能更好、可以明确纠错结果是否有误码等。目前,水声信道下较为常用的仍然是卷积码、Turbo码,LDPC码的应用还在研究探索中。迫切需要解决的是如何将Turbo码(或LDPC码)与具体的水声调制方式相结合,尽量减少编码或译码时的计算复杂度,以便在实时水声通信中的实际应用。
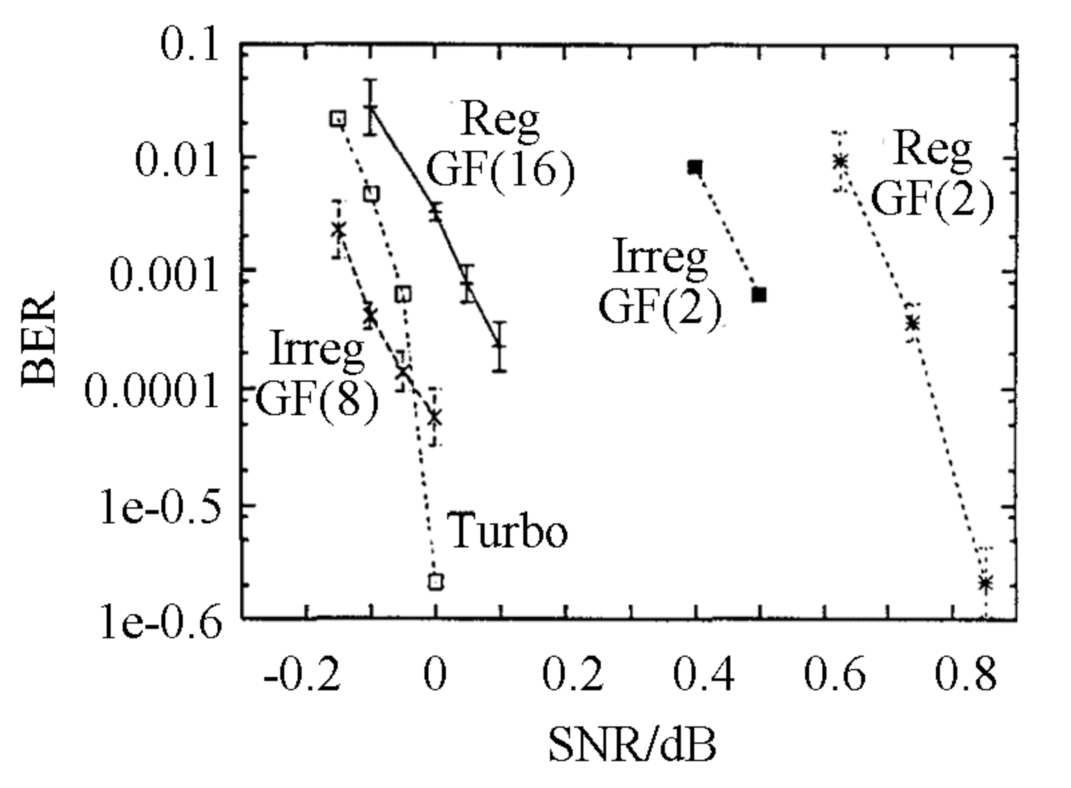
图5 两种纠错码的性能比较
四、水声网络
水声通信网络的研究起步于20世纪90年代。90年代初,美国的AOSNs(自组织采样网)率先提出“水声网”概念,并以海网Seaweb计划进行实践、验证,很快证实了利用声学进行水下组网的可行性,衍生出一系列水声网计划和应用。如FRONT沿海大陆架监测计划、分布式DADS沿海军事反战计划,展现了水声网络应用的广阔前景。世界各国也纷纷投入这方面研究,经过数十年的发展,在水下信道、水声物理通信、水声网络协议等方面都有很大进展,并已经有成型的网络系统出现。
作为最恶劣的无线信道之一,水声网络在设计、信号处理等方面,都面临巨大的挑战。主要有以下几个不利因素限制:
⑴通信能力受限:与陆上网络相比,水声网络的设计和构建较为困难,很大程度上是由于水声物理层复杂的时、空、频变及强多途、高噪声、多普勒效应等因素所致。
⑵网络通信效率较低,拓扑结构不稳定:由于网络节点长期工作在水下,能量供应严重受限,往往电池的寿命就直接决定了该网络节点的寿命,因此系统设计的时候要尽可能节约资源。
⑶由以上两点可见,水声网络的规模受到严重的限制,导致目前水声网络无法规模化、长久化。
因为大规模的网络使研究进一步复杂,且规模越大,覆盖范围越大,节点越多,通信中的时延也越大,导致整体网络的性能降低,能量消耗加剧,进一步缩短了网络的寿命。因此,目前的研究还仅停留在短时期内的小型网络上。
历经12年的海网Seaweb是美国海军实验性远程声纳和海洋网络计划中的重要部分,是目前比较成功的水声网络概念。从具体技术细节来看,Seaweb可以支持2k字节长度的数据包和2400bits/s的通信速率,但是为了改善网络性能和电池续航能力,采用了350字节长度的数据包,标称速率为800bits/s。常用带宽为9~14kHz,另外还使用了16~21kHz和25~39kHz两个频带。点对点最大通信距离10km,部署深度小于1000m。
水声调制解调器在Seaweb计划中发挥着重要作用,承担着数据发送和接收的重要任务,是Seaweb乃至任何成熟水声通信网的关键部分。表1为美国Benthos公司第4代水声Modem(2008)的性能指标。
表1 Benthos第4代水声Modem性能(2008 年)
在Seaweb计划的早期阶段使用的是第一代水声调制解调器ATM850。以时分多址(TDMA)方式,但网络效率很低只进行了4个节点的测试。
Seaweb98试验使用第二代水声调制解调器ATM875。Sesweb98采用FDMA方式、树状形式的拓扑结构,验证了存储转发、自动重传、简单的静态路由等概念。在试验中,远程自治节点的数据包经过4次水声中继和1次无线通信中继后,能可靠地到达岸基指控中心,证明了采用分布节点群构成广域水声网络的可行性。Seaweb99增加了节点和网关以及运行在网关上的Seaweb服务器,节点数为15个。实现对节点的测距定位、网络配置和网络动态控制。试验表明,FDMA能有效地在网络中实现多址访问,但带宽利用率较低。
Seaweb2000试验使用了第三代水声调制解调器ATM885,网络节点已达17个。采用了混合式CDMA/TDMA的复用方式,增加了协议的控制功能。同样是在2000年,美国“海豚”级潜艇使用ATM885进行了一系列Sublink通信试验。有报道称,该艇在水深约122m处航行时,通过浮标网关节点中继,向岸基Internet发送了包含文字、图像、图表和其他信息在内的E-mail报文。尽管试验发现Sublink技术还有待进一步完善,但它比潜艇现有的单向低数据率超低频(ELF)无线通信优越。“海豚”级潜艇还演示了与水下其他设备的调制解调器进行通信和指挥控制功能。在Seaweb网络支持下,Sublink提供了潜艇隐蔽通信的新手段,克服了传统通信手段隐蔽性差的弱点。
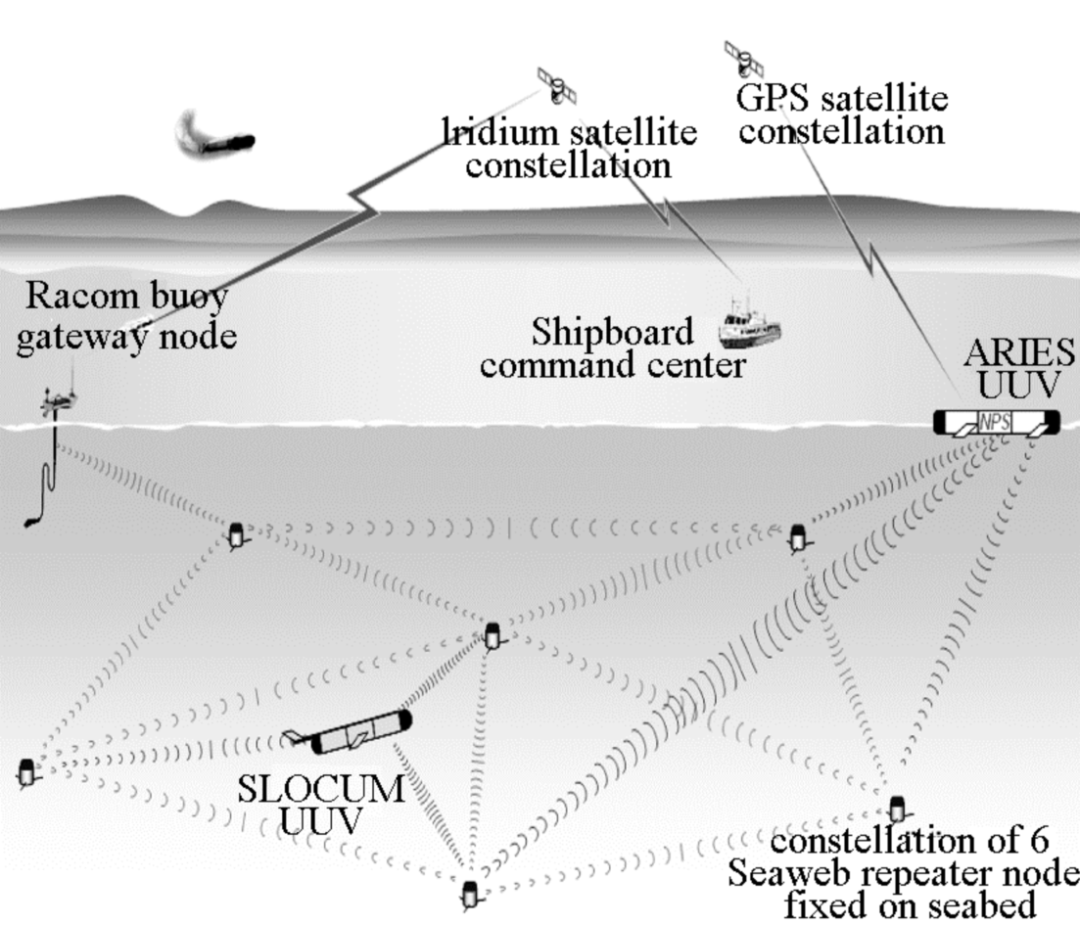
从Seaweb2001开始用潜艇作为移动节点。Seaweb2003在东墨西哥湾进行的实验包含了3个水下无人器、2个网关浮标和6个分节点(见图6),该实验测试了用于追踪和引导水下移动节点的水下测距功能。
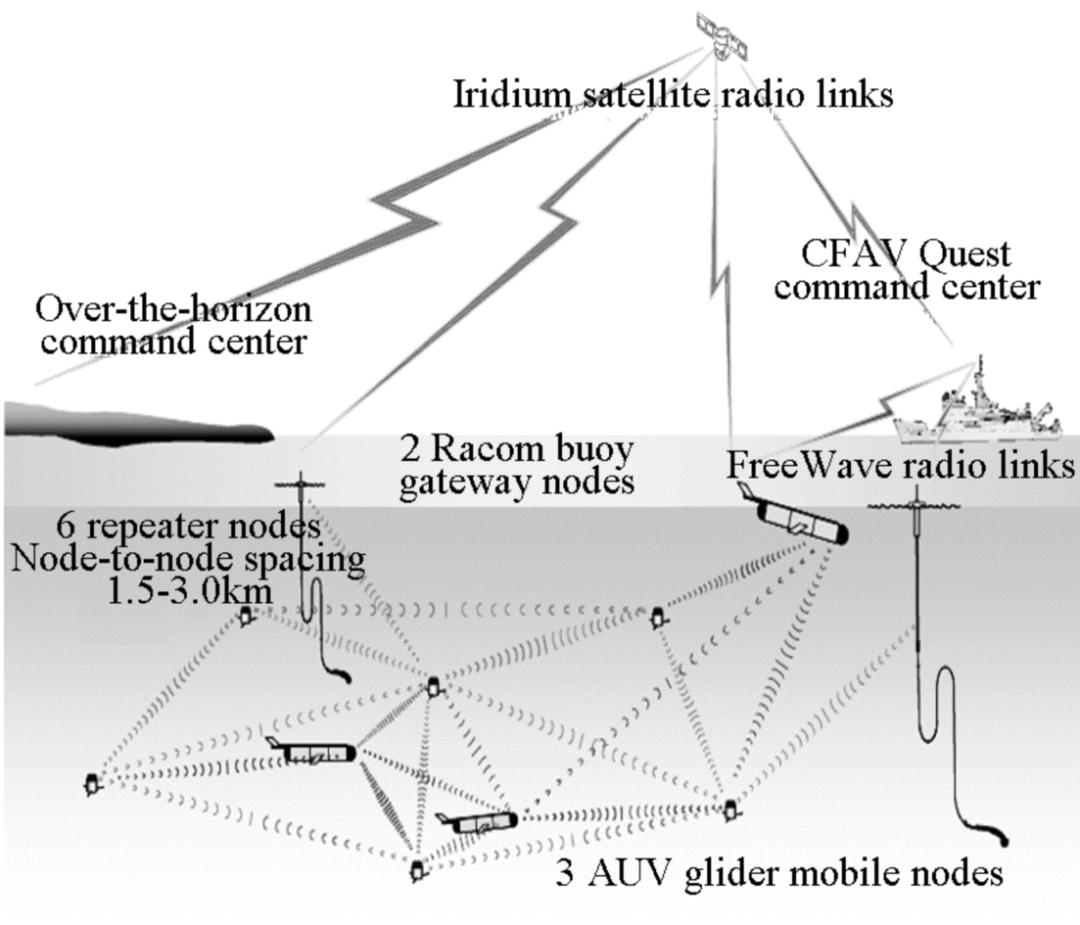
图6 Seaweb2003试验示意图
Seaweb2004用了40个节点(见图7)。试验验证了分布式拓扑结构和动态路由协议。Seaweb2005在蒙特利尔湾及圣安德鲁湾进行的UUV实验中采用了六个呈五边形分布、系留在海床上的的通信节点,用于UUV导航实验(见图8)。
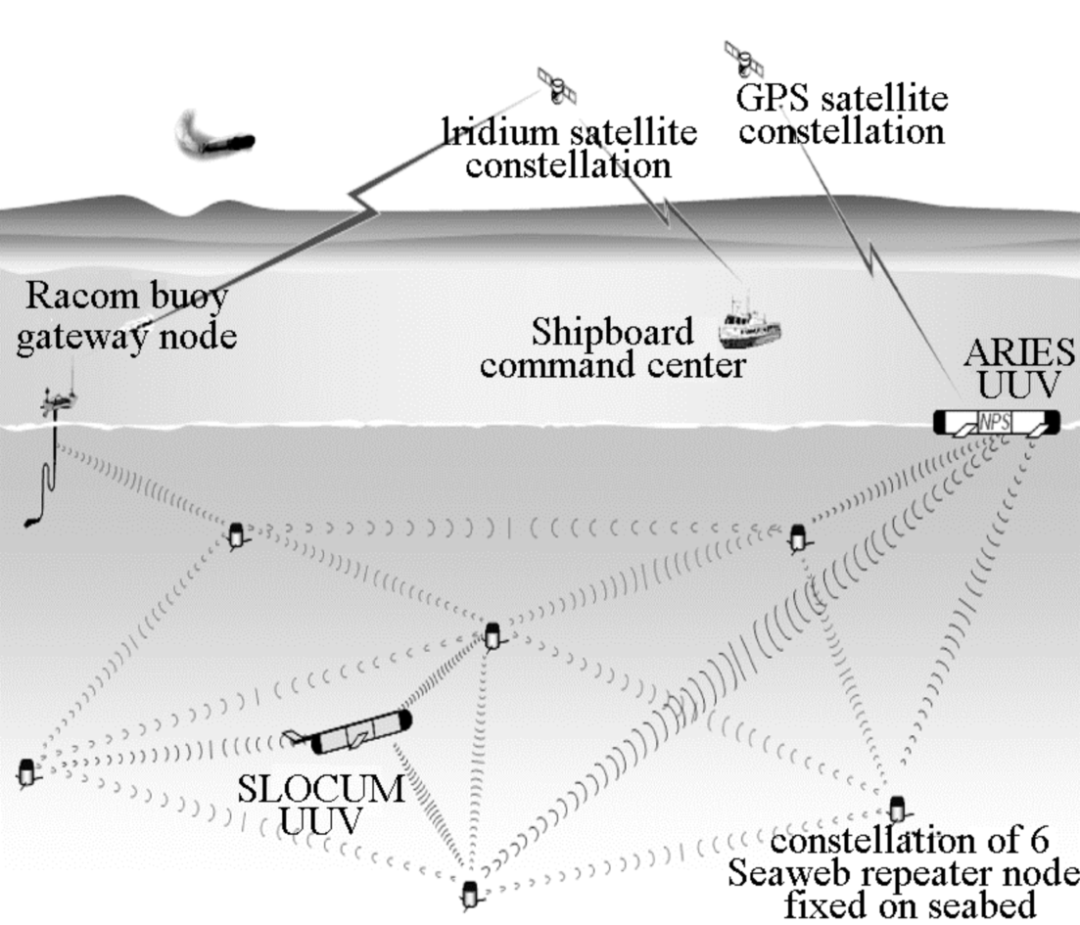
图7 Seaweb2004试验示意图
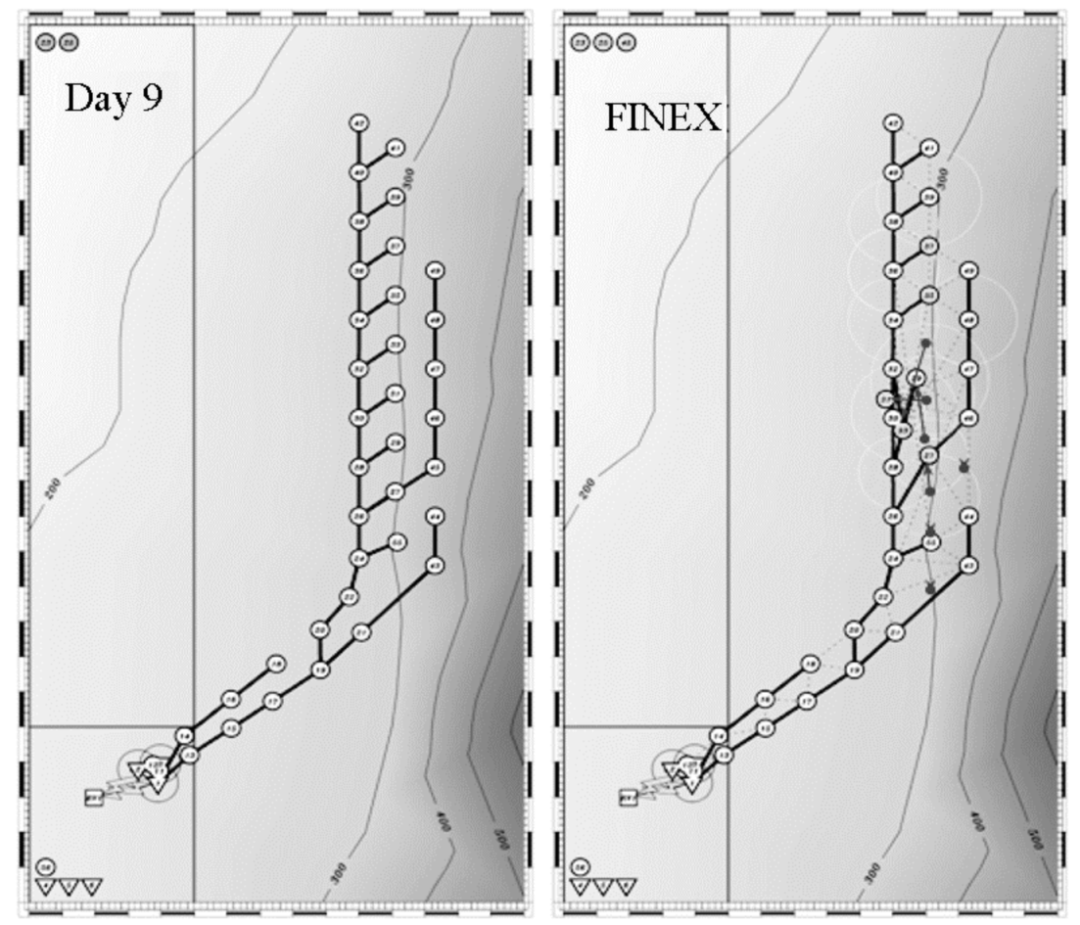
图8 Seaweb2005试验示意图
此外,国外其他研究机构也开展了不同形式的水声网络实验:
美国伍兹霍尔海洋研究所构建了一套包含Racom浮标在内的水下AUV控制网络。该系统所用AUV源于水下无人采样航行器,加上侧扫声纳后用于浅海海底描绘和探雷。系统网络通信部分采用变长数据包。网络拓扑情况为主从式和分布式结构。2004年5月的试验显示了系统对所用AUV的良好控制效果。同时,试验显示控制距离取决于水下信道条件:在水质均匀、硬质海底环境下,控制距离可达2000~3000m;如果是在软质海底环境下,表面水温又比较高,控制距离则缩小到大约1000m。
美国麻省理工学院构建了一套名为AquaNodes的水下传感器网络,并在2007年前进行了超过100次的湖试和海试。在该项目中,温度和压力等传感器以及光学照相机作为主要探测设备,连同水声调制解调器以及一波长532nm的绿激光光学调制解调器一起被封装在圆形的防水容器内,如图9所示。

网络通信部分采用TDMA协议和自同步技术,以及30kHz的FSK声学调制解调模式,在海水和淡水中以330bits/s的速率进行400m以上距离的通信。AquaNodes系统非常轻便,可以人工布放。一旦设备布放完成,可以自动采用2D算法或更复杂的3D分布式算法进行自身定位。系统由一个56W-h的锂离子电池供电,在全功率工作模式下自持力为1~2周,而在休眠状态下自持力可达一年,具备较高的工作性能。
国内水声通信网的建设虽然早在2001年或更早的时间有报道在一些单位进行,但截至目前,公开报道的水声通信网络海上实验构建的实质性研究成果还较少,多为理论研究和仿真实验等。中国科学院声学研究所、中国船舶重工集团第715研究所、东南大学、西北工业大学等相关科研院所已进行过小规模水声网络实验,并在抚仙湖等地进行过实地测试。
五、展望
水声通信与水声网络技术必将在人类探索海洋、认识海洋和开发海洋中发挥越来越重要的作用。未来的水声通信网既可以获取大范围的海洋信息,也可以快速、便捷地传递、控制和管理各种信息。建立一个庞大的全球海洋温度、海流、潮汐数据和资源监测网络,并能实现数据的可靠实时传输,将对人类认识海洋、预警灾害性气候、环境保护等方面发挥非常重要的作用,无论在军事或是民用上都具有重要的应用前景。主要的应用领域:⑴水声反潜网络;⑵水下潜器的命令和数据传送;⑶水声网络的协作传输与探测技术;⑷网络化海洋环境监测和灾害预警。
1
END
资料来源于微信公众号:溪流之海洋人生
相关资料链接:https://mp.weixin.qq.com/s/bsPbChD-47GBJOL6SU3SHw
-1.1 引言
--1.1 引言
-1.1 引言作业
-1.2声呐系统和声信道模型
-1.2声呐系统和声信道模型作业
-2.1 平均能量信道概述
--平均能量信道概述
-2.1 平均能量信道概述作业
-2.2 海水中的声速
-2.2 海水中的声速作业
-2.3 海水中的声吸收、海洋环境噪声
-2.3 海水中的声吸收、海洋环境噪声作业
-2 .4 海底反射损失
-2 .4 海底反射损失作业
-2.5 分层介质中的射线声学
-2.5 分层介质中的射线声学作业
-2.6 等梯度水层中的声线和声场
-2.6 等梯度水层中的声线和声场作业
-2.7 深海声传播方式与扩展损失
-2.7 深海声传播方式与扩展损失作业
-2.8.1 浅海的PEKERIES模型
-2.8.1 浅海的PEKERIES模型作业
-2.8.2 浅海的PEKERIES模型(二)
-2.8.2 浅海的PEKERIES模型(二)作业
-3.1 相干多途信道概述
-3.1 相干多途信道概述作业
-3.2 相干多途信道系统函数
-3.2 相干多途信道系统函数作业
-3.3 相关器和匹配滤波器
-3.3 相关器和匹配滤波器作业
-3.4 信号模糊度函数
-3.4 信号模糊度函数作业
-3.5 拷贝相关器在相干多途信道中的响应
-3.5 拷贝相关器在相干多途信道中的响应作业
-3.6 自适应相关器
--自适应相关器
-3.6 自适应相关器作业
-3.7 自适应相关器在相干多途信道中的响应
-3.7 自适应相关器在相干多途信道中的响应作业
-3.8 相干多途信道中的互相关
-3.8 相干多途信道中的互相关作业
-3.9.1 时间反转镜技术原理
-3.9.1 时间反转镜技术原理作业
-3.9.2 时间反转镜技术分类
-3.9.2 时间反转镜技术分类作业
-4.1 随机时变空变信道理论基础
-4.1 随机时变空变信道理论基础
-4.2 随机声场的一般概念和描述
--4.2 声信号起伏作业
-4.3 时变信道的系统函数
-4.3 时变信道的系统函数作业
-4.4 随机时变信道的系统函数
-4.4 随机时变信道的系统函数作业
-4.5.1 广义平稳信道WSS信道、非相关散射信道US信道(一)
--4.5.1 广义平稳信道WSS信道、非相关散射信道US信道(一)
-4.5.1 广义平稳信道WSS信道、非相关散射信道US信道(一)作业
-4.5.2 广义平稳信道WSS信道、非相关散射信道US信道(二)
--4.5.2 广义平稳信道WSS信道、非相关散射信道US信道(二)
-4.5.2 广义平稳信道WSS信道、非相关散射信道US信道(二)作业
-4.6.1 广义平稳非相关散射信道WSSUS
-4.6.1 广义平稳非相关散射信道WSSUS
-4.6.2 匹配滤波器在WSSUS信道中的响应
-4.7 散射函数
--4.7 散射函数
-4.7 散射函数作业
-4.8 相干函数
--4.8 相干函数
-4.8 相干函数作业
-5.1 缓慢时变信道的相干多途信道
-5.1 缓慢时变信道的相干多途信道作业
-5.2.1 散射函数实验结果(一)
-5.2.1 散射函数实验结果(一)作业
-5.2.2 散射函数实验结果(二)
--Video
-第五章 缓慢时变的相干多途信道--5.2.2 散射函数实验结果(二)
-5.3 信道相干性的测量方法
-第五章 缓慢时变的相干多途信道--5.3 信道相干性的测量方法
-5.4.1 相干信道中运动声源的系统函数(一)
-第五章 缓慢时变的相干多途信道--5.4.1 相干信道中运动声源的系统函数(一)
-5.4.2 相干信道中运动声源的系统函数(二)
-第五章 缓慢时变的相干多途信道--5.4.2 相干信道中运动声源的系统函数(二)
-5.5 目标运动时互相关的损失
-第五章 缓慢时变的相干多途信道--5.5 目标运动时互相关的损失
-6.1 混响信道概述
-6.1 混响信道概述--作业
-6.2 混响的平均特性
-第六章 混响信道--6.2 混响的平均特性
-6.3 混响的散射函数
-第六章 混响信道--6.3 混响的散射函数
-6.4 混响的多普勒特性
-第六章 混响信道--6.4 混响的多普勒特性
-6.5 混响的统计特性&抗混响
-第六章 混响信道--6.5 混响的统计特性&抗混响
-7.1 目标信道
--7.1 目标信道
-第七章 主动声呐目标信道--7.1 目标信道
-7.2 相干目标信道与多亮点模型
-第七章 主动声呐目标信道--7.2 相干目标信道与多亮点模型
-《水下目标探测研究现状与展望》
--2020青岛海科展开幕,全球首款探鱼无人机、万米海底观测地震等神器首次亮相
-世界各国深海探测技术发展现状
-声学的基础知识
--信道模型
--声学发展简史
-水声领域相关知识
-- 蛙人探测声呐系统发展综述
--海洋技术▏三维激光技术在水下大坝与门槽结构精密检测中的应用
--黑科技,世界上功率最大的海底铺管机器人,堪比七辆重型卡车!
--美国海军推进15个水下技术领域:从无人航行器到先进武器系统
-发展新型声纳系统的几个科学问题
-开学第一课,西湖大学校长施一公给你讲
-人民海军——生日快乐
--人民海军生日快乐
-三维图解台湾地形:控制日本和韩国咽喉的要地!台湾位置有多重要”
--三维图解台湾地形:控制日本和韩国咽喉的要地!台湾位置有多重要?
-FMCW雷达角度估计
-055一体化桅杆简洁隐身的背后——代表一流综合射频技术
-中国工程院发布“中国电子信息工程科技发展十六大挑战”。
-目标跟踪基础知识:角跟踪技术
-美国提出“侦察威慑”概念——无人机将在大国对抗中发挥关键作用
--美国提出“侦察威慑”概念——无人机将在大国对抗中发挥关键作用
-水声信号处理相关学习资料
--简述计算机三大变换的联系和区别 (傅里叶变换、拉普拉斯变换、z变换)
-“MIT教授Gilbert Strang最新《线性代数》课程”
--“MIT教授Gilbert Strang最新《线性代数》课程”
-俄 “琴弦-1”多基地雷达可以发现隐身目标
-美国最先进核潜艇被逆向工程以后......
-英国推进海上无人平台指挥控制能力发展
-雷达基础知识
-欧洲水下声通信技术发展综述
-热点前沿国际动态
--热点|马斯克的星际飞船爆炸1天后,SpaceX龙飞船载人首飞成功,创造历史



