
当前课程知识点:水下声信道 > 学习资料 > 水声领域相关知识 > 蛙人探测声呐系统发展综述
作者:黄颖淞1, 葛辉良1, 王付印2, 谢 勇1
单位:1. 中国船舶重工集团公司 第715研究所, 浙江 杭州, 310023; 2. 国防科技大学 光电科学与工程学院, 湖南 长沙, 410073
蛙人由于目标小、破坏性大, 可担负常规力量无法完成的任务, 已成为港口与近岸水域的严重威胁之一。水下蛙人探测是非传统安全保障领域的一个重要研究方向, 对于港口、大型舰船、滨海娱乐场所、海上石油钻井平台等重点水域的安保和防御具有重要意义。文中首先论述蛙人的主要特征, 指出了蛙人探测的难点问题, 同时阐述蛙人探测声呐(DDS)的相关原理。随后以英国、以色列、加拿大等国和国内具有代表性的产品为例, 详细介绍当前国内外DDS系统的发展状况。最后总结我国在DDS方面取得的成果, 指出国内DDS技术与国外的差距, 展望DDS的技术发展趋势, 为促进我国DDS的发展提供借鉴与参考。
冷战结束后, 各主要西方国家对海上的关注逐步由深海转向浅海乃至港口附近的水域。而近年来, 以蛙人或小型运载器的形式针对港口、船只、水上设备以及其他设施的袭击时有发生。由于目标小, 破坏性大, 可担负水下侦察、爆破、暗杀、救援、破障、目标指引等常规力量无法完成的任务, 蛙人成为港口与近岸水域的严重威胁[1]。
当今, 许多国家都非常重视港口及近岸水域防御的相关建设, 西方国家投入了大量的人力和物力对相关核心技术进行研发, 并在重要港口、航道等位置都构建了水域安防系统, 现已初见成效[2-3]。我国海洋面积辽阔, 随着海上及海岸设施的建设, 港口、船只等水上设施的安全保障也愈加受到重视。
水下小目标探测在一定程度上能够有效保证港口等水上设施的安全。水下蛙人探测是非传统安全保障领域中一个新的研究方向, 也是当前国内外小目标探测发展的重点和难点, 对于港口、船只和海上设备等重点保护水域安保和防御有重要意义。1.1 水下声辐射特征
与其他水下目标不同, 蛙人以生物为载体, 需要在水下呼吸, 除了具有一般小目标的声散射特性外, 还具有一定的声辐射特性。
蛙人声辐射的主要来源是人体的肺部组织。当蛙人呼吸时, 呼吸气体在呼吸器内的流动会引起一系列振动和波动, 从而发生声辐射。因此, 可以通过对蛙人的呼吸声信号和噪声信号进行特征提取, 以区分不同水下目标的类型[4-5]。
蛙人呼吸具有明显的周期性特征。在每个呼吸周期中, 蛙人呼吸产生的信号具有3个连续的持续时间: 吸气、呼吸保持和呼气。在每个单独的持续时间, 蛙人的信号由不同的机制产生。在水下吸气期间, 蛙人携带的压力调节阀会产生信号; 在呼吸保持期间, 将会以背景噪声为主; 在水下呼气期间, 则会由呼出的气泡产生信号。通常情况下, 蛙人呼吸的时间周期大致为5~12 s, 具体取决于蛙人的游泳技能和训练水平。专业潜水员的标准呼吸技术是:用3~4 s的时间吸气、用4~5 s的时间呼气[6-7]。
1.2 水下目标强度特征
目标强度是指水下目标如潜艇、蛙人、水雷和鱼类等反射的回波强度。
蛙人、水雷和鱼类等物体由于自身体积较小, 被定义为小目标。对于小目标而言, 目标强度不仅低, 而且能否被发现主要依赖于声呐系统的波长。但是, 对于大部分主动声呐而言, 由于其他方面的需求使得其波长在通常情况下会小于目标的最小尺寸, 从而避免了小目标带来的问题[8]。
影响蛙人目标强度的因素主要有呼吸器、潜水服和人体本身, 三者之中影响最大的是呼吸器。呼吸器分为开式呼吸器和闭式呼气器, 蛙人利用的开式呼吸器会产生气泡群, 且开式呼吸器的气瓶比闭式呼气器的气瓶大。因此, 采用开式呼吸的蛙人比采用闭式呼吸的蛙人具有更大的目标强度。
蛙人体积较小, 水下等效反射半径小于0.3 m。同时, 蛙人在水下的行动噪声也非常小,目标强度较低。负重9 kg的普通蛙人水下平均行进速度大致为1 kn, 目标强度在–16~–25 dB之间; 装备助推装置的蛙人最高可负重90 kg, 水下推进速度为2.5~3 kn, 目标强度在–12 dB左右[9-11]。
蛙人作为一种水声目标, 可以反射声波, 也可以产生辐射噪声信号, 这就为声呐设备探测提供了基本的条件。
2.1 声呐频谱
图1中列举了一些常用声呐的频率, 跨度为10 Hz~10 MHz。由图1可看出, 探测目标的体积越大, 声呐频率越低, 反之则越高。反潜战(anti-submarine warfare, ASW)的目标为潜艇, 其长度通常为数十米, 因此, ASW声呐的频率在10 kHz以下; 蛙人、水雷和常见鱼类由于体积差别不大, 因此, 反水雷(mine-counter measure, MCM)声呐、蛙人探测声呐(diver detection sonar, DDS)和鱼类声呐的频率也较为接近, 通常在100 kHz左右; 而医疗声呐的频率最高可达10 MHz以上。

图1 声呐频谱图
从ASW主被动声呐和蛙人探测主被动声呐的频率来看, 在探测目标相同的前提下, 被动声呐所用的频率低于主动声呐的频率。
2.2 DDS工作模式
按照工作原理的不同, DDS分为2种类型: 主动声呐和被动声呐。由于蛙人体积小、辐射波弱, 因此通常采用高频主动声呐探测技术进行探测。
主动式DDS工作频带范围约为50~500 kHz, 发射声强级约为180~210 dB, 对蛙人的探测距离最高可达2 000 m。主要有固定和机动2种安装方式, 前者通常放置在海底或者码头,后者则以吊放的形式部署。主动换能器持续发射强脉冲信号并在一定的水平范围内扫描,探测返回回波, 若在某一方向上出现强回波, 则可根据返回时间和波束扫描角度确认目标的距离和方位。
主动式DDS的优点是探测距离远, 缺点是需要水下换能器长时间工作, 存在水下噪音污染, 固定安装时需要定期清洗换能器等。
被动式DDS工作频带范围约为100~300 Hz, 探测距离最大为200 m。被动式DDS虽然具有可长时间工作、维护成本低等优点; 但是, 被动式DDS探测距离近, 且仅能用于噪声较大的目标, 例如装有螺旋桨助推器的蛙人, 局限性较大, 因此, 被动声呐较少用于蛙人探测。
近几年, 国外DDS发展迅速, 我国也已着手研究相关技术。以英国、以色列、加拿大等国和国内具有代表性的产品为例, 介绍当前国内外DDS系统的发展状况, 以便了解当前国内外DDS的发展水平, 为促进我国的DDS发展提供参考。
3.1 英国DDS系统
3.1.1 冥府守门狗360
“冥府守门狗360”(Cerberus 360)是英国奎奈蒂克(QinetiQ)公司研制的高性能主动式DDS系统, 能自动探测、识别和跟踪水下威胁, 其水下部分如图2所示。

图2 “冥府守门狗360”蛙人探测声呐
Cerberus 360的声呐单元功能很强, 能够在800 m范围内对蛙人进行探测。当蛙人的速度为1~2 kn时, 这个探测距离可以为操作者提供至少25 min的处置时间。系统仅利用一个独立声呐单元就实现了360°的全方位覆盖。这些声呐单元既可以单独使用, 悬挂在船舷两侧, 为舰船提供保护; 也可以多个联合使用, 部署在海床上, 形成一道警戒线, 保护海港和航道的安全。若采用后者的方式进行布放, 该系统的侦察范围最长可延伸到1 000 m之外[12]。
通过收集足够的有效目标回波, 该声呐能够在水下500 m的距离识别出人类所特有的胸腔, 分辨出水下目标是蛙人还是其他哺乳动物(如海狮和海豚), 进而减少虚警率。
QinetiQ公司还主张对港口和海港实行分层防御, 旨在防御不同种类和不同范围的威胁。因此, Cerberus 360和该公司相关的一些技术, 例如结合光纤传感器和高清晰度地面雷达的远程水下被动监视阵列, 可以集成起来提供超过10 km的系统解决方案。
2004年, 美国国防部与QinetiQ公司签订了有关Cerberus 360的合同, 该系统在英国成功试用之后不久即交付美军使用, 并沿用至今。3.1.2 蛙人侦察系统
蛙人侦察系统(diver reconnaissance system, DRS)是英国QinetiQ公司研制的一种手持式DDS, 如图3所示。这种手持式DRS能够在避碰模式和目标定位模式下工作。系统重10 kg, 水下部分重0.5 kg, 能够在100 m的深度工作。依靠电池提供能源, 可持续工作6.5 h。
图3 蛙人侦察系统
DRS的探测主传感器是一部工作频率高达500 kHz的前视高频电子扫描声呐, 能够在230 m距离上探测到强度为-25 dB的目标。DRS还具有导航功能, 其导航系统采用长基线主动声学发射方式, 导航误差可控制在0.5 m以内, 最大导航距离可达1 200 m。系统的声呐探测和导航信息可以同时显示在一个平板显示器上, 任务完成后还可以进行过程回放,便于分析。DRS可用于支持濒海和两栖作战、海滩搜索、港口警戒、蛙人探测、内陆水系调查和考古等。
QinetiQ公司于2005年9月向英国国防部交付了首套DRS。
3.1.3 “地狱狗”DDS
“地狱狗”DDS(Cerberus Mod2)是英国Atlas Elektronik公司研制的便携式DDS,能够探测水下1 000 m内的目标, 堪称反蛙人利器。其水下探头如图4所示。

图4 “地狱狗”DDS
“地狱狗”DDS是独立成套系统, 其布放简单, 维护便捷, 可以单独布放, 用于区域防护, 也可以多个协同布放, 形成一个安全区域。当多个“地狱狗”DDS同时布放在一个区域时, 每个声呐都是一个基站, 每个基站可同时跟踪50个目标。
“地狱狗”DDS由1个频率在70~130 kHz之间可选的高分辨率大带宽主动声呐作为核心, 由1~3个压电换能器阵进行360°探测, 覆盖区域高达4.5 km2, 可探测900 m外的开式呼吸蛙人和700 m外的闭式呼吸蛙人, 且能够跟踪850 m外的开式呼吸蛙人和675 m外的闭式呼吸蛙人。该便携式声呐对威胁的反应时间是25 min, 方位精度可达到1°以内, 能精确探测到位于水下2~50 m的目标, 虚警率极低。
目前, 德国海军已采购了数套该型声呐, 并在护卫舰上进行了安装。
3.1.4 “哨兵”反蛙人声呐
“哨兵”反蛙人声呐(Sentinel intruder detection sonar, Sentinel IDS)由英国Sonardyne公司研制,是世界上部署最为广泛的DDS之一, 其水下探头如图5所示。

图5 “哨兵”反蛙人声呐
自2006年推出以来, “哨兵”IDS将高可靠、远距离蛙人探测提升到了一个新的水平。该系统体积小、质量轻、虚警率低, 一经配置即可自主运行。
系统由干端处理机和湿端声呐探头两部分组成, 可通过电缆连接, 布放灵活。一个干端工作站可以同时控制、显示和处理10个声呐探头, 并可避免相互干涉。系统完成布放后, 通过较少的人为干预, 就可通过探测、跟踪和识别软件对水中目标进行评估。
“哨兵”IDS的声呐探头直径仅为30 cm, 高40 cm, 质量为35 kg。系统工作频率为70 kHz, 带宽为20 kHz, 方位精度为0.1°~0.5°, 最大工作深度为50 m, 对开式蛙人的最大测距为900 m, 具有联网功能。
美国海军和斯洛文尼亚海军先后购置了该型号声呐系统[13]。
3.2 以色列DDS系统
以色列的DSIT公司主要研发了3种用于水下安全的DDS系统, 包括“水盾”DDS(AquaShield DDS)、“尖盾”便携式DDS(PointShield portable DDS)和港口监视系统(harbor surveillance system, HSS)。
3.2.1 “水盾”DDS系统
“水盾”DDS系统是一种高性能DDS系统, 其水下单元如图6所示。其能够为高价值的设施提供永久性的安全保障, 如海军基地、港口、石油和天然气平台、海上平台、水下管道和电缆、核电设施和运河等。
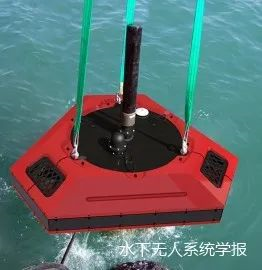
图6 “水盾”DDS
“水盾”DDS支持各种类型水下目标的长距离探测, 包括使用呼吸器、水肺的蛙人和无人水下航行器(unmanned underwater vehicle, UUV)。“水盾”DDS采用模块化设计架构, 可在部署和安装方面实现最大的灵活性。该系统提供120°、240°和360°共3种扇区覆盖配置, 所有配置均涵盖整个相关柱面。开式呼吸蛙人探测距离为1 000 m; 闭式呼吸蛙人探测距离为700 m。
系统支持从探测、跟踪到识别和警报的全自动操作, 能够同时对1 000多个声呐触点进行实时和连续跟踪, 从而降低了对人工辅助的要求。先进的信号处理算法确保了高检测概率(probability of detection, PD)和低虚警率(false alarm rate, FAR)的理想兼顾[14]。
自2007年面世以来, “水盾”DDS成为DDS系统领域的畅销者。
在“水盾”DDS的基础上, 2014年6月, DSIT推出了“水盾”DDS扩展系统(AquaShield extended range, AquaShield ER)。AquaShield ER提供了前所未有的探测距离, 蛙人运载器探测距离达3 500 m, 开式蛙人探测距离达1 800 m, 闭式蛙人探测距离达1 200 m。
3.2.2 “尖盾”便携式DDS系统
“尖盾”便携式DDS系统主要用于保护停泊在港口的船舶免受水下威胁, 其水下单元如图7所示。

图7 “尖盾”便携式DDS
“尖盾”便携式DDS系统也适用于覆盖在有限区域内的固定安装。“尖盾”便携式DDS系统具有质量轻、结构紧凑、便于携带、可快速部署和探测等优点。该系统坚固耐用, 能够在恶劣水域进行长期连续的水下作业, 因此也是永久性安装的理想选择。
与“水盾”类似, “尖盾”便携式DDS系统同样支持全自动操作, 支持探测多种类型的水下威胁, 并且检测概率非常高、虚警率低。
系统提供360°全方位的覆盖, 完全环绕被保护物体, 覆盖整个相关柱面。对开式呼吸蛙人, 探测距离为700 m; 对闭式呼吸蛙人, 探测距离为500 m。
2018年1月8日, 印度海军订购了78个“尖盾”便携式DDS装置[15]。
3.2.3 HSS
为了防止入侵者破坏、非法闯入或恐怖袭击, 以及满足全球对可靠港口保护和水下港口安全的迫切需求, DSIT公司开发了一套全面的港口监控系统(HSS), 能够可靠探测、跟踪和警告蛙人、潜水器和小型水面船只等入侵者。
HSS通过集成DDS、监视雷达、电光器件创建统一的指控中心。其由高频DDS系统、昼夜均可工作的电光观察系统、高分辨率雷达、指挥与控制系统以及方向单位组成, 可以在浅水或深水、白天或夜晚以及所有天气条件下运行。
3.3 加拿大DDS系统
CSDS-85 型海港安全监测声呐系统(water-side security sonar, WSS) 是加拿大C-Tech 公司的第5代高性能海港监测声呐, 其水下部分如图8所示。其工作频率为80 kHz, 带宽为3 kHz, 最大探测距离能达到2 000 m。既能够360°水域全方位监视, 也能够选择扇面监视范围; 既可以单独在港口展开监视, 也可以多台联网工作, 形成较大的监控区域。CSDS-85主要的功能为: 对蛙人、蛙人输送艇(swimmer delivery vehicle, SDV)、自主水下航行器(autonomous undersea vehicles, AUV)和部分小型潜艇进行短距离探测。其部署方式有多种选项, 包括底部安装、船只安装, 或使用吊车、起重机进行侧面部署。
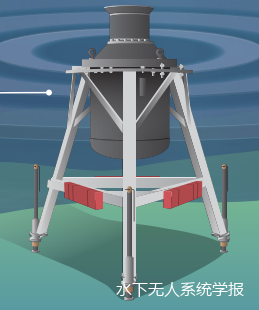
图8 CSDS-85型海港安全监测声呐系统
3.4 土耳其DDS系统
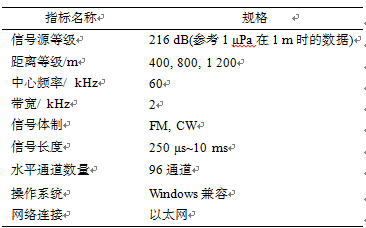
2012年, 土耳其研发了一种新型DDS。该声呐是一种高频主动声呐, 能够探测高达1 200 m范围的闭式潜水系统。该声呐主要由水下单元和水上单元2个部分组成, 即湿端和干端。水下单元由扩展模块和接收模块组成, 水上单元位于系统控制室内, 由电子柜和操控台构成。系统主要的构成如图9所示, 主要参数如表1所示[16]。
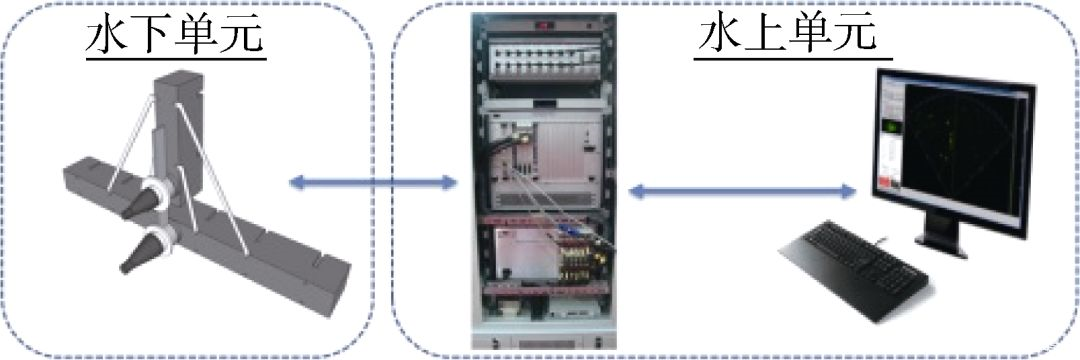
图9 土耳其DDS系统设计
表1 土耳其DDS系统参数
研究人员在不同季节条件下对该声呐进行了为期1年的现场试验。在这些试验中, 通过温度对声速曲线的影响, 观察探测距离的变化。为避免一些与试验无关的环境噪声影响测试结果的准确性, 研究人员还开发了一种自适应降低环境噪声的算法, 并在该系统上成功运行[17]。
该系统在现场试验中能够通过声光报警对水下目标做出识别和警告, 从而探测出水下威胁。
3.5 国内研究发展概况
相比于欧美等发达国家而言, 我国在蛙人探测方面起步较晚, 但是也取得了一定的成果,并将这些成果投入到了实际的运用中。
3.5.1 中科院声学所DDS
国内首先自主开展DDS研制的是中国科学院声学研究所。中科院声学所突破国外技术封锁, 基于其成熟的高频声呐研制技术, 成功研制了全部自主知识产权的DDS。该DDS系统的中心频率为100 kHz, 带宽为10 kHz, 不仅具有连续波(continuous wave, CW)脉冲信号体制,还具有线性调频(linear frequency modulation, LFM)、伪随机编码以及双曲调频等几种信号体制, 是当时国内唯一的数字多波束DDS。该系统在2008年的北京奥运会青岛帆船比赛(青岛奥帆赛)和上海世博会等水下安保中得到了成功应用。图10为上海世博会的水下安防系统组成示意图[18]。
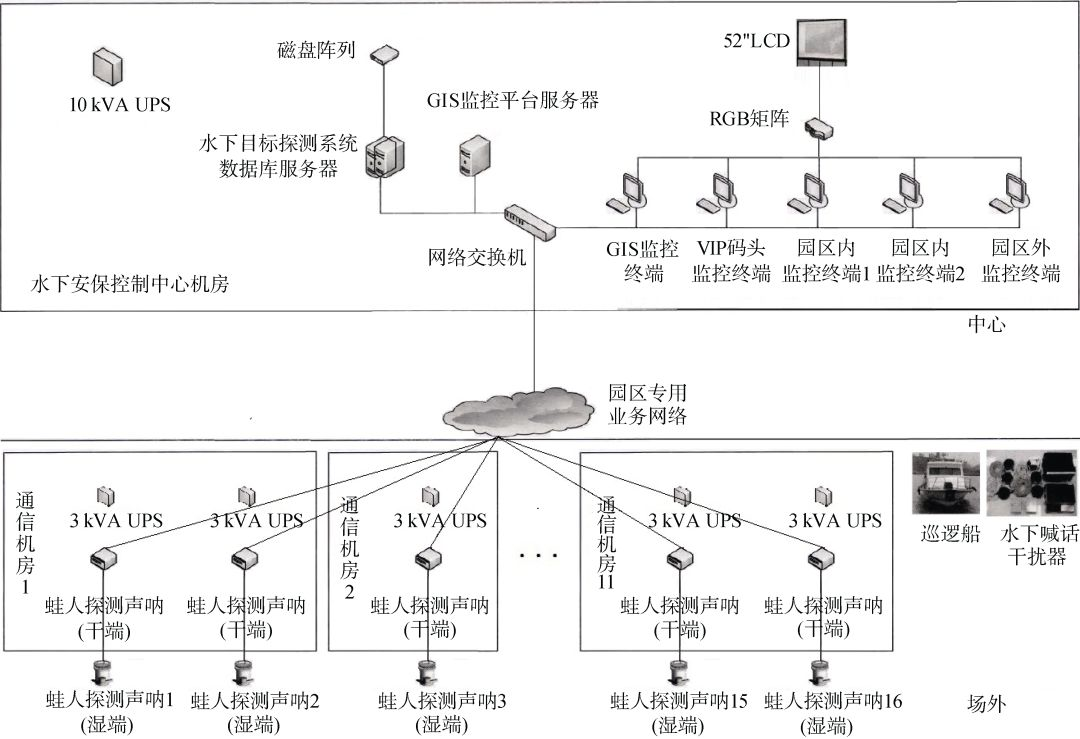
图10 上海世博会应用的水下安防系统组成示意图
同时, 中科院声学所还结合厦门金砖五国会议、上海世博会、广州亚运会等大型活动及三峡大坝等重要设施的水下安防需求, 开展了多部DDS的系统集成, 并集成了水下喊话器等处置装备, 也开始了引接雷达、视频等水面探测信息降低水下目标探测虚警率的尝试。
3.5.2 TRONKA声呐系统
中国和乌克兰早期共同研制了TRONKA声呐系统, 但是该系统仅在乌克兰获得了专利[19]。
TRONKA声呐系统主要由传感器、声速剖面仪、绞车、电源和显示器等部分组成, 如图11所示。传感器采用的是压电磁感应器, 声速剖面仪用于测量系统所在位置的声速, 并根据声速值由绞车调节系统位置, 以便得到更好的测量效果。传感器接收到目标的回波后, 实时显示声呐系统捕获的图像, 并给出目标的方位、距离、运动速度及系统所在点的声速和声线图等信息, 同时通过信号处理对目标进行判断, 最终检测出目标类别。
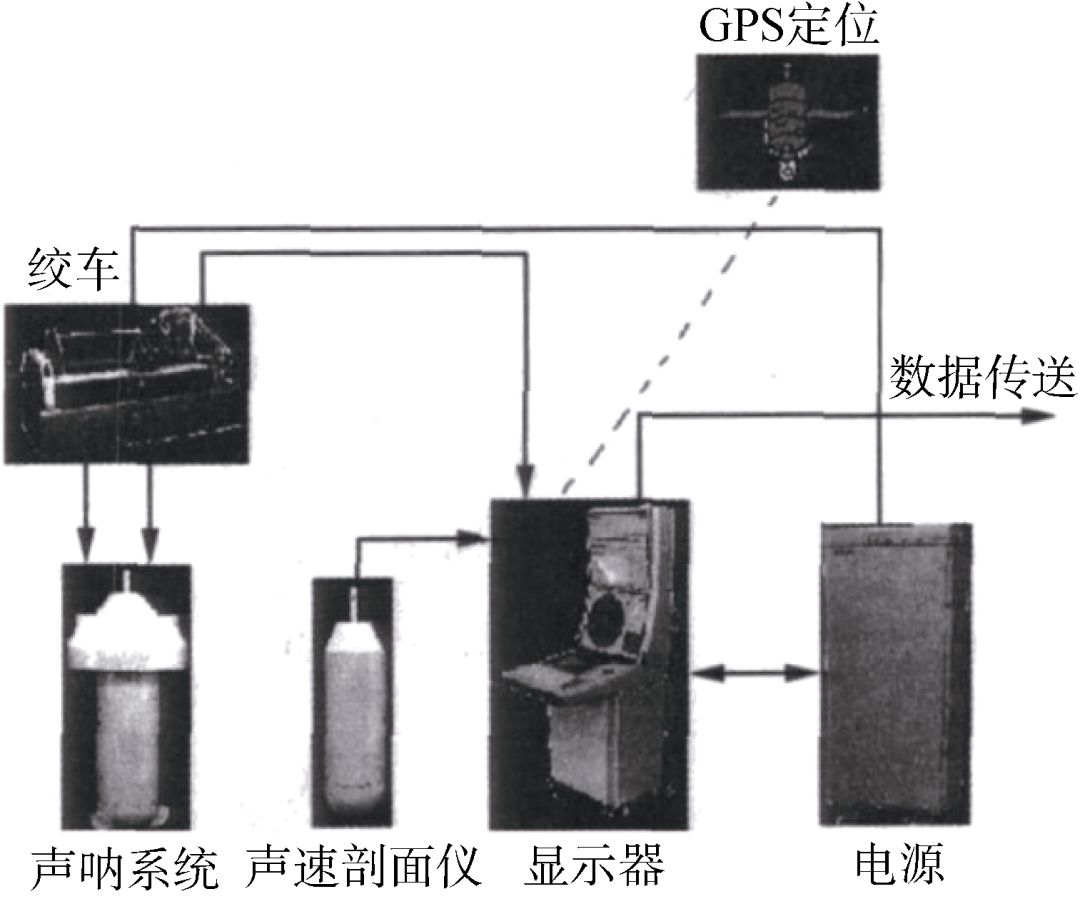
图11 TRONKA声呐系统组成
TRONKA声呐系统采用高频探测技术, 工作频率为60 kHz, 监测水域纵深7~100 m,可探测以声呐系统为中心半径500 m区域内的目标。
该系统探测的方位精度为2°, 距离精度为1.5%, 传感器可在水下20 m深的位置工作, 测量声速的深度可达100 m, 但探测的目标要求半径大于0.3 m, 运动速度为1.5~6 kn。
TRONKA声呐系统能够探测潜艇、UUV和蛙人等水下活动目标和潜伏的非活动目标, 以及海底爆炸物等固定目标, 并实时将监测结果送入数据处理装置, 经数据处理、目标识别和判断, 把信息传送给岸站, 即安全控制中心, 从而形成水下安全防护监测系统, 以防御蛙人袭击, 保护港口、潜艇和舰船等的安全。2008年, 该系统在青岛奥帆赛的浮山湾赛场水下安保中得到成功应用[20-21]。
3.5.3 国内其他DDS系统
2012年, 上海船舶运输科学研究所与中科院声学所2家单位联合研发生产了当时国内最新型的2010型DDS。该声呐系统覆盖范围为180°, 工作频率为70 kHz, 采用CW和LFM 2种信号机制。带宽为4~20 kHz不等, 能很好地调节分辨率与作用距离的关系。为了更好地匹配水下复杂地形, 系统还能调节垂直相控发射, 最大调节为±15°。在复杂多变混浊水域中的探测距离大于200 m, 在清澈水域中的探测距离达到500 m以上[22]。此外, 中船集团726所和715所也先后成功研制了DDS产品。文中综述了DDS系统的国内外发展现状。目前, 国外在DDS系统方面已经取得了较大的成果。近年来, 我国也越来越重视水下安防技术的研究, 并在相关产品方面取得了一些成果, 有些成果已经应用。例如, 国内自主研制的多型蛙人声呐系统, 在探测距离上已接近国际先进水平; 高频高分辨率成像声呐也已有多型样机; 水下运动小目标的被动探测技术也已研究, 并开展了海上试验验证。
在DDS技术方面, 虽然我国在硬件层面上已经基本攻克, 但在其他方面还有一些难点问题需要解决, 主要体现在:
1) 在后端系统集成方面, 存在虚警率高, 无法有效区别蛙人和大型海洋生物等问题;
2) 在工程实践方面, 面对近岸港口附近生物附着严重, 如何突破是一个需要解决的问题;
3) 大多数港口水质较为混浊, 加之船只驶过产生的大量气泡会导致声呐系统对目标进行误判, 因此需要减小水文条件等其他因素的干扰;
4) 如何进一步提高探测距离, 通过系统优化布局实现最佳探测效率仍有待进一步研究。
上述问题的攻克, 将不断提高港口、航道等水上设施的安全, 有效降低恐怖袭击等的威胁。
我国有漫长的海岸线、众多的港口和辽阔的海疆, 沿海经济带是我国经济发展最为活跃的区域, 是国家高价值战略资产的重要集聚场所, 同时也是敌对势力重点针对的场所。因此, 如何保卫港口、领海和重点水域的安全, 防止水下蛙人的袭扰破坏, 是我国水声技术领域面临的一项重要课题, 也将是未来技术发展的重要方向。
-1.1 引言
--1.1 引言
-1.1 引言作业
-1.2声呐系统和声信道模型
-1.2声呐系统和声信道模型作业
-2.1 平均能量信道概述
--平均能量信道概述
-2.1 平均能量信道概述作业
-2.2 海水中的声速
-2.2 海水中的声速作业
-2.3 海水中的声吸收、海洋环境噪声
-2.3 海水中的声吸收、海洋环境噪声作业
-2 .4 海底反射损失
-2 .4 海底反射损失作业
-2.5 分层介质中的射线声学
-2.5 分层介质中的射线声学作业
-2.6 等梯度水层中的声线和声场
-2.6 等梯度水层中的声线和声场作业
-2.7 深海声传播方式与扩展损失
-2.7 深海声传播方式与扩展损失作业
-2.8.1 浅海的PEKERIES模型
-2.8.1 浅海的PEKERIES模型作业
-2.8.2 浅海的PEKERIES模型(二)
-2.8.2 浅海的PEKERIES模型(二)作业
-3.1 相干多途信道概述
-3.1 相干多途信道概述作业
-3.2 相干多途信道系统函数
-3.2 相干多途信道系统函数作业
-3.3 相关器和匹配滤波器
-3.3 相关器和匹配滤波器作业
-3.4 信号模糊度函数
-3.4 信号模糊度函数作业
-3.5 拷贝相关器在相干多途信道中的响应
-3.5 拷贝相关器在相干多途信道中的响应作业
-3.6 自适应相关器
--自适应相关器
-3.6 自适应相关器作业
-3.7 自适应相关器在相干多途信道中的响应
-3.7 自适应相关器在相干多途信道中的响应作业
-3.8 相干多途信道中的互相关
-3.8 相干多途信道中的互相关作业
-3.9.1 时间反转镜技术原理
-3.9.1 时间反转镜技术原理作业
-3.9.2 时间反转镜技术分类
-3.9.2 时间反转镜技术分类作业
-4.1 随机时变空变信道理论基础
-4.1 随机时变空变信道理论基础
-4.2 随机声场的一般概念和描述
--4.2 声信号起伏作业
-4.3 时变信道的系统函数
-4.3 时变信道的系统函数作业
-4.4 随机时变信道的系统函数
-4.4 随机时变信道的系统函数作业
-4.5.1 广义平稳信道WSS信道、非相关散射信道US信道(一)
--4.5.1 广义平稳信道WSS信道、非相关散射信道US信道(一)
-4.5.1 广义平稳信道WSS信道、非相关散射信道US信道(一)作业
-4.5.2 广义平稳信道WSS信道、非相关散射信道US信道(二)
--4.5.2 广义平稳信道WSS信道、非相关散射信道US信道(二)
-4.5.2 广义平稳信道WSS信道、非相关散射信道US信道(二)作业
-4.6.1 广义平稳非相关散射信道WSSUS
-4.6.1 广义平稳非相关散射信道WSSUS
-4.6.2 匹配滤波器在WSSUS信道中的响应
-4.7 散射函数
--4.7 散射函数
-4.7 散射函数作业
-4.8 相干函数
--4.8 相干函数
-4.8 相干函数作业
-5.1 缓慢时变信道的相干多途信道
-5.1 缓慢时变信道的相干多途信道作业
-5.2.1 散射函数实验结果(一)
-5.2.1 散射函数实验结果(一)作业
-5.2.2 散射函数实验结果(二)
--Video
-第五章 缓慢时变的相干多途信道--5.2.2 散射函数实验结果(二)
-5.3 信道相干性的测量方法
-第五章 缓慢时变的相干多途信道--5.3 信道相干性的测量方法
-5.4.1 相干信道中运动声源的系统函数(一)
-第五章 缓慢时变的相干多途信道--5.4.1 相干信道中运动声源的系统函数(一)
-5.4.2 相干信道中运动声源的系统函数(二)
-第五章 缓慢时变的相干多途信道--5.4.2 相干信道中运动声源的系统函数(二)
-5.5 目标运动时互相关的损失
-第五章 缓慢时变的相干多途信道--5.5 目标运动时互相关的损失
-6.1 混响信道概述
-6.1 混响信道概述--作业
-6.2 混响的平均特性
-第六章 混响信道--6.2 混响的平均特性
-6.3 混响的散射函数
-第六章 混响信道--6.3 混响的散射函数
-6.4 混响的多普勒特性
-第六章 混响信道--6.4 混响的多普勒特性
-6.5 混响的统计特性&抗混响
-第六章 混响信道--6.5 混响的统计特性&抗混响
-7.1 目标信道
--7.1 目标信道
-第七章 主动声呐目标信道--7.1 目标信道
-7.2 相干目标信道与多亮点模型
-第七章 主动声呐目标信道--7.2 相干目标信道与多亮点模型
-《水下目标探测研究现状与展望》
--2020青岛海科展开幕,全球首款探鱼无人机、万米海底观测地震等神器首次亮相
-世界各国深海探测技术发展现状
-声学的基础知识
--信道模型
--声学发展简史
-水声领域相关知识
-- 蛙人探测声呐系统发展综述
--海洋技术▏三维激光技术在水下大坝与门槽结构精密检测中的应用
--黑科技,世界上功率最大的海底铺管机器人,堪比七辆重型卡车!
--美国海军推进15个水下技术领域:从无人航行器到先进武器系统
-发展新型声纳系统的几个科学问题
-开学第一课,西湖大学校长施一公给你讲
-人民海军——生日快乐
--人民海军生日快乐
-三维图解台湾地形:控制日本和韩国咽喉的要地!台湾位置有多重要”
--三维图解台湾地形:控制日本和韩国咽喉的要地!台湾位置有多重要?
-FMCW雷达角度估计
-055一体化桅杆简洁隐身的背后——代表一流综合射频技术
-中国工程院发布“中国电子信息工程科技发展十六大挑战”。
-目标跟踪基础知识:角跟踪技术
-美国提出“侦察威慑”概念——无人机将在大国对抗中发挥关键作用
--美国提出“侦察威慑”概念——无人机将在大国对抗中发挥关键作用
-水声信号处理相关学习资料
--简述计算机三大变换的联系和区别 (傅里叶变换、拉普拉斯变换、z变换)
-“MIT教授Gilbert Strang最新《线性代数》课程”
--“MIT教授Gilbert Strang最新《线性代数》课程”
-俄 “琴弦-1”多基地雷达可以发现隐身目标
-美国最先进核潜艇被逆向工程以后......
-英国推进海上无人平台指挥控制能力发展
-雷达基础知识
-欧洲水下声通信技术发展综述
-热点前沿国际动态
--热点|马斯克的星际飞船爆炸1天后,SpaceX龙飞船载人首飞成功,创造历史

