
当前课程知识点:水下声信道 > 学习资料 > 声学的基础知识 > 声学基础知识之声压的基本概念
对于刚刚接触噪声和振动领域的工程师,那么所谓声压,声功率和声强这些术语很容易令人混淆,这其中是因为它们都比较常用且相互关联的,更不用说它们都经常用分贝表示。但是,它们在声音传播和体验方式中,又分别代表声音的不同而重要的方面。
声压是大多数声学工作的基础,不仅因为它的客观数字与我们的听觉类似,而且实际上,声压是人们真正可以进行的唯一测量之一!同时,声压的测量是声功率和声强计算的基础。 当物体发出声音时,它会前后振动,这也会导致物体附近的空气分子也振动。这种振动链反应以波的形式向外(以声速)继续传播。这些波类似于石头掉入池塘时在水中形成的波。
顾名思义,我们使用压力单位(帕斯卡,N/m²)来量化声压,该值表示构成声音的所有不同正弦波的总振幅(也称为“总声压级 (Overall Level)”)。
但是,这里需要注意的是,这个压力实际上只是我们的耳朵(和麦克风)承受的压力的交变部分。由于地球的重力,我们也承受着巨大的“静态”压力。这就是“大气压”。海平面的大气压约为101.3kPa,即194dB!
但是,由于大气压在大多数情况下是恒定的,并且由于我们实际上仅对压力信号的交变部分感兴趣,因此通常减去大气压并将声压级归一化,观察其在0值上下浮动。
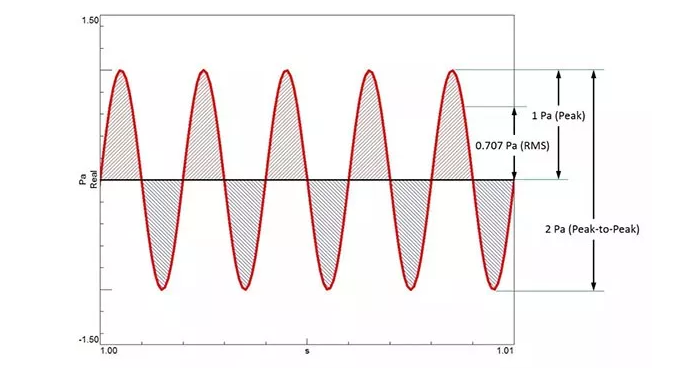
正如我们在下图中所示,归一化的声波产生的压力有正有负,分别对应于红色和蓝色阴影区域。即使归一化的声压既为正也为负,我们仅将压力波的振幅定为正值。可以使用峰值,峰到峰 (Peak to Peak) 或RMS来描述该振幅。当我们听到声音时,我们的大脑充当这些正负振动的积分器,并且感知到稳定的正振幅,而未感知到各个正弦波的实际波动。
在下图 (A) 中,我们看到较小振幅的声波撞击驻极体麦克风,导致麦克风膜片以较小的振幅来回振动。膜和带电荷的圆盘之间的这种相对运动称为“背板”,从而导致电容差。此差异会从麦克风产生与膜位移成比例的电压输出。在下图 (B) 中,我们看到相同的声源输出更高振幅的声波,这导致麦克风膜以更高振幅振动,从而输出更大的电压。
就像池塘中的波浪一样,声波在各个方向上都从声源向四周传播,振幅随距离变大而下降。这是因为我们用石头把一定的能量注入水中,为了使转移到水中的能量保持恒定,随着波向四周,波的振幅必须减小,这也是为什么越靠近声源,声波的振幅就越大。随着我们离声源越远,等量的能量就会散布在更大的区域上,因此振幅变小。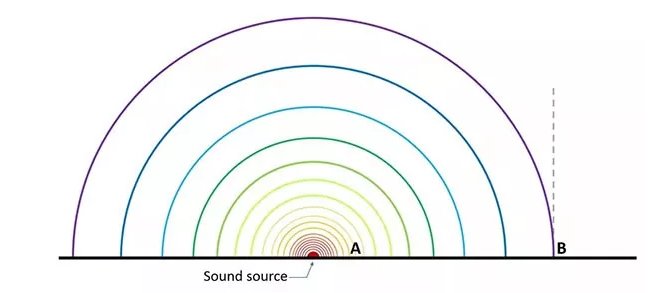
相关内容来源于公众号声振之家,版权归其所有。相关内容链接https://mp.weixin.qq.com/s/OqilGvekIg6w2OSaE_ZqCw
-1.1 引言
--1.1 引言
-1.1 引言作业
-1.2声呐系统和声信道模型
-1.2声呐系统和声信道模型作业
-2.1 平均能量信道概述
--平均能量信道概述
-2.1 平均能量信道概述作业
-2.2 海水中的声速
-2.2 海水中的声速作业
-2.3 海水中的声吸收、海洋环境噪声
-2.3 海水中的声吸收、海洋环境噪声作业
-2 .4 海底反射损失
-2 .4 海底反射损失作业
-2.5 分层介质中的射线声学
-2.5 分层介质中的射线声学作业
-2.6 等梯度水层中的声线和声场
-2.6 等梯度水层中的声线和声场作业
-2.7 深海声传播方式与扩展损失
-2.7 深海声传播方式与扩展损失作业
-2.8.1 浅海的PEKERIES模型
-2.8.1 浅海的PEKERIES模型作业
-2.8.2 浅海的PEKERIES模型(二)
-2.8.2 浅海的PEKERIES模型(二)作业
-3.1 相干多途信道概述
-3.1 相干多途信道概述作业
-3.2 相干多途信道系统函数
-3.2 相干多途信道系统函数作业
-3.3 相关器和匹配滤波器
-3.3 相关器和匹配滤波器作业
-3.4 信号模糊度函数
-3.4 信号模糊度函数作业
-3.5 拷贝相关器在相干多途信道中的响应
-3.5 拷贝相关器在相干多途信道中的响应作业
-3.6 自适应相关器
--自适应相关器
-3.6 自适应相关器作业
-3.7 自适应相关器在相干多途信道中的响应
-3.7 自适应相关器在相干多途信道中的响应作业
-3.8 相干多途信道中的互相关
-3.8 相干多途信道中的互相关作业
-3.9.1 时间反转镜技术原理
-3.9.1 时间反转镜技术原理作业
-3.9.2 时间反转镜技术分类
-3.9.2 时间反转镜技术分类作业
-4.1 随机时变空变信道理论基础
-4.1 随机时变空变信道理论基础
-4.2 随机声场的一般概念和描述
--4.2 声信号起伏作业
-4.3 时变信道的系统函数
-4.3 时变信道的系统函数作业
-4.4 随机时变信道的系统函数
-4.4 随机时变信道的系统函数作业
-4.5.1 广义平稳信道WSS信道、非相关散射信道US信道(一)
--4.5.1 广义平稳信道WSS信道、非相关散射信道US信道(一)
-4.5.1 广义平稳信道WSS信道、非相关散射信道US信道(一)作业
-4.5.2 广义平稳信道WSS信道、非相关散射信道US信道(二)
--4.5.2 广义平稳信道WSS信道、非相关散射信道US信道(二)
-4.5.2 广义平稳信道WSS信道、非相关散射信道US信道(二)作业
-4.6.1 广义平稳非相关散射信道WSSUS
-4.6.1 广义平稳非相关散射信道WSSUS
-4.6.2 匹配滤波器在WSSUS信道中的响应
-4.7 散射函数
--4.7 散射函数
-4.7 散射函数作业
-4.8 相干函数
--4.8 相干函数
-4.8 相干函数作业
-5.1 缓慢时变信道的相干多途信道
-5.1 缓慢时变信道的相干多途信道作业
-5.2.1 散射函数实验结果(一)
-5.2.1 散射函数实验结果(一)作业
-5.2.2 散射函数实验结果(二)
--Video
-第五章 缓慢时变的相干多途信道--5.2.2 散射函数实验结果(二)
-5.3 信道相干性的测量方法
-第五章 缓慢时变的相干多途信道--5.3 信道相干性的测量方法
-5.4.1 相干信道中运动声源的系统函数(一)
-第五章 缓慢时变的相干多途信道--5.4.1 相干信道中运动声源的系统函数(一)
-5.4.2 相干信道中运动声源的系统函数(二)
-第五章 缓慢时变的相干多途信道--5.4.2 相干信道中运动声源的系统函数(二)
-5.5 目标运动时互相关的损失
-第五章 缓慢时变的相干多途信道--5.5 目标运动时互相关的损失
-6.1 混响信道概述
-6.1 混响信道概述--作业
-6.2 混响的平均特性
-第六章 混响信道--6.2 混响的平均特性
-6.3 混响的散射函数
-第六章 混响信道--6.3 混响的散射函数
-6.4 混响的多普勒特性
-第六章 混响信道--6.4 混响的多普勒特性
-6.5 混响的统计特性&抗混响
-第六章 混响信道--6.5 混响的统计特性&抗混响
-7.1 目标信道
--7.1 目标信道
-第七章 主动声呐目标信道--7.1 目标信道
-7.2 相干目标信道与多亮点模型
-第七章 主动声呐目标信道--7.2 相干目标信道与多亮点模型
-《水下目标探测研究现状与展望》
--2020青岛海科展开幕,全球首款探鱼无人机、万米海底观测地震等神器首次亮相
-世界各国深海探测技术发展现状
-声学的基础知识
--信道模型
--声学发展简史
-水声领域相关知识
-- 蛙人探测声呐系统发展综述
--海洋技术▏三维激光技术在水下大坝与门槽结构精密检测中的应用
--黑科技,世界上功率最大的海底铺管机器人,堪比七辆重型卡车!
--美国海军推进15个水下技术领域:从无人航行器到先进武器系统
-发展新型声纳系统的几个科学问题
-开学第一课,西湖大学校长施一公给你讲
-人民海军——生日快乐
--人民海军生日快乐
-三维图解台湾地形:控制日本和韩国咽喉的要地!台湾位置有多重要”
--三维图解台湾地形:控制日本和韩国咽喉的要地!台湾位置有多重要?
-FMCW雷达角度估计
-055一体化桅杆简洁隐身的背后——代表一流综合射频技术
-中国工程院发布“中国电子信息工程科技发展十六大挑战”。
-目标跟踪基础知识:角跟踪技术
-美国提出“侦察威慑”概念——无人机将在大国对抗中发挥关键作用
--美国提出“侦察威慑”概念——无人机将在大国对抗中发挥关键作用
-水声信号处理相关学习资料
--简述计算机三大变换的联系和区别 (傅里叶变换、拉普拉斯变换、z变换)
-“MIT教授Gilbert Strang最新《线性代数》课程”
--“MIT教授Gilbert Strang最新《线性代数》课程”
-俄 “琴弦-1”多基地雷达可以发现隐身目标
-美国最先进核潜艇被逆向工程以后......
-英国推进海上无人平台指挥控制能力发展
-雷达基础知识
-欧洲水下声通信技术发展综述
-热点前沿国际动态
--热点|马斯克的星际飞船爆炸1天后,SpaceX龙飞船载人首飞成功,创造历史

