当前课程知识点:惯性导航原理 > 第三章 惯性仪表陀螺仪 > 3.1三浮陀螺仪 > 3.1.2 三浮陀螺仪
大家好
这节课由我给大家讲
第三章
惯性仪表陀螺仪的第一节
三浮陀螺仪
前面大家已经知道
陀螺仪可以测量
相对惯性空间的角运动
对于机械式转子陀螺仪
其工作原理
是建立在牛顿力学基础上的
动量矩定理
是分析陀螺动力学特性的基本方程
具有角动量H
是陀螺与一般刚体的根本区别
而角动量是由机械旋转产生
机械旋转必须依靠支承
所以支承技术
是机械转子陀螺的关键技术
陀螺精度是由其漂移来衡量的
可用公式ωd=Md/H来近似描述
显然
其值主要取决于
输出轴上干扰力矩Md
和角动量H
角动量H由陀螺电机产生
其稳定性非常重要
干扰力矩Md
主要取决于
陀螺框架轴承间的
干摩擦力矩
该力矩是一项最大的
不确定性误差源
惯性仪表的发展历史
可以说是
同其支承的有害力矩
作斗争的历史
三浮陀螺
是如何减小干扰力矩Md
达到甚至优于惯性级精度
0.01度/小时的呢
先从总体上认识一下三浮
先看它的整体结构
一
三浮陀螺整体结构
首先
三浮陀螺仪
它是一种单自由度陀螺仪
它的三浮是指
液浮
磁悬浮
和气浮
液浮采用液体的浮力
来支持陀螺仪的浮筒
以减小轴承间的接触
磁悬浮则利用电磁力的作用
以保证枢轴始终处于
轴承的中心位置
仅起到定输出轴中心的作用
不单独使用
气浮则作用于陀螺驱动轴之间
利用轴承间隙内
微小间隙中形成的气膜
将陀螺转子轴
支撑起来
下面分别介绍
二
液浮支撑
先看它的基本结构组成
液浮陀螺支撑主要体现在结构上
其组成包括
浮子组件
力矩器
信号器
壳体等
浮子组件
是单自由度陀螺仪的框架组件
是陀螺中的活动部件
陀螺电机
安装在浮子内部的框架上
并需要精确定位
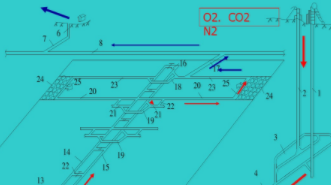
整个浮子无论采取何种形式
都必须先抽真空
然后再充气
这个气体主要有氢气或氦气
然后再可靠密封
浮子组件沿输出轴
是通过一对轴尖宝石座
支承在壳体上的
并且与信号器
力矩器
以及磁悬浮系统同轴工作
这就要保证各元件精确同心
浮子组件在装入壳体之前
必须先在状态相同的浮液中
进行精确的静平衡
这包括
浮子组件精确的力平衡
和力矩平衡
当整个壳体组装成后
还要向壳体的间隙内
充浮液
然后再密封
浮液的一些物理特性
是与温度有关的
为了保证
其有一个稳定的温度工作环境
壳体上
通常还装有加温线圈
浮液是液浮陀螺的悬浮介质
对其要求是什么呢
我们看第二个
对浮液的要求
对浮液的要求可分为物理特性
和化学特性两方面
物理特性的基本要求是
较大密度
浮液的密度足够高
才能产生足够大的浮力
而不致于要求浮子组件
有过大的空腔
要有较大的粘度
三浮陀螺为速率积分陀螺
要求有较大的阻尼
另外它还是电的绝缘体
还有较高的导热系数等
此外
还要求物理性能稳定
不产生分层等
化学特性的基本要求是
浮液本身化学成分很稳定
不会自行分解和变质
安全性好
浮液与所接触的零部件
不起任何化学反应
浮液本身
并不是绝对刚性的
所以轴承之间
还是可能发生接触的
从而引起
不确定性干扰力矩
影响精度
只有确保轴承之间
始终处于可靠的无接触状态
才能彻底消除不确定性的误差源
因此
还需要引入磁悬浮
以增加浮子组件的悬浮刚度
三 磁悬浮
磁悬浮系统分为
无源磁悬浮和有源磁悬浮两种
有源悬浮的刚度
比无源磁悬浮高许多倍
因此
在过高载环境中为陀螺仪所采用
有源磁悬浮引入了几套力反馈回路
来提供定位恢复力
反馈回路的增益
原则上可以不受限制
因而
能使悬浮刚度大幅度提高
并且
在无负载的情况下
基本不消耗功率
但是轴向定位
必须设置一套单独的反馈回路
图中给出了
两套径向有源磁悬浮回路
其原理为
上下两个电感器L
与两个电阻Rb
组成了交流电桥
利用其来感受浮子枢轴的
上下位移
并从桥式回路的输出端
得到差动误差信号
经放大解调后
再驱动功率放大器
产生足够的控制电流
反馈到储能绕组L中去
最终产生所需的恢复力
这个力反馈系统
是非线性
电感器L
也称作储能绕组
既是敏感元件
又是执行元件
作为执行元件
其工作特性是非线性的
容易产生
不对称力矩
必须进行专门的稳定性校核
好 后面我们再来介绍一下
动压气浮轴承
陀螺电机的轴承
是在高转速下工作的
为了保证陀螺电机转速的稳定
陀螺马达普遍采用动压气浮轴承
我们假设轴承的轴瓦半径为R
轴颈半径为r
R显然是大于r的
根据流体力学理论
在轴颈轴承中
受负载的转子
总是与轴承处于
相互偏心的位置
由于气体有一定粘度
被运动的轴承表面所带动
气体流过轴承间隙
会对两边形成压力
即所谓流体动力楔
间隙越小
压力越大
上下间隙不等
就会形成压力差
另一方面
由于气体具有可压缩效应
间隙小的部位体积缩小
气体密度增大
对两边形成压力
即所谓气体密度楔
两种楔的合成
形成支承负载的合力
流体动力楔和气体密度楔的理论解释
是以流体动力学的
连续性原理为基础的
对于没有侧流的轴颈轴承
沿轴向单位长度上的
流体质量流速
为常数
即气体密度ρ
与气膜径向厚度h
以及h处的平均速度u
的乘积等于常数
一
流体动力楔
当公式中的密度ρ保持不变
则只能用速度u的变化
来补偿气膜厚度h的变化
而速度的变化
形成压力的变化
从而形成气膜润滑
这种不可压缩的润滑
被称为流体动力楔
根据流体连续性原理
对于稳定的流动
通过任一截面的流量
应当相等
对不可压缩的流体
流速u对高度y从0到h的积分为常数
通过推导可得
最大压力Pmax等于
环境压力P0
加上
流体粘滞系数u
与上壁速度u0的乘积的3倍
再除以流管平均高度h的4倍
再乘以h1减h2
除以h1与h2的乘积
要获得增压效应
必须使h1大于h2
即收敛型楔体流管
二
气体密度楔
所谓气体密度楔
则是假定速度u保持不变
用改变密度ρ
来补偿气膜厚度h的变化
在最小气膜厚度处
密度最高
产生的压力最大
在最大气膜高度处
密度最低
产生压力最低
这种气体的
压缩效应称为气体密度楔
三
气浮轴承工作原理
如果轴颈
在重力G作用下
某一瞬间
中心向下偏移距离为e
这时上部间隙变大
下部间隙变小
当轴颈
以角速度Ω高速旋转
流体动力楔产生的压力N1
和气体密度楔产生的压力N2
共同作用
形成承载力N
与陀螺组件重力G相平衡
使转子处于悬浮状态
到这里已经介绍了三浮陀螺仪
知道三浮陀螺仪有哪三浮
以及作用于哪个轴
其基本结构和原理是什么
本节的内容就到这里
谢谢
-1.1惯性导航基本概念
--1.1.3 小节测试
-1.2惯性导航技术发展史
--1.2 知识导授
--1.2.3 小节测试
-1.3惯性导航常用坐标系
--1.3 知识导授
--1.3.1 小节测试
--1.3.2 小节测试
--1.3.3 小节测试
-2.1陀螺仪的定义及分类
--2.1.3 小节测试
-2.2刚体转子陀螺仪的基本特性
--2.2 知识导授
--2.2.3 小节测试
-2.3陀螺仪运动方程的建立
--2.3 知识导授
--2.3.1 小节测试
--2.3.2 小节测试
--2.3.3 小节测试
-2.4陀螺仪运动特性分析
--2.4 知识导授
--2.4.1 小节测试
--2.4.2 小节测试
-第二章 主观题
-3.1三浮陀螺仪
--3.1.3 小节测试
-3.2静电陀螺仪
--3.2.3 小节测试
-3.3动力调谐陀螺仪
--3.3.3 小节测试
-3.4光学陀螺仪
--3.4 知识导授
--3.4.1 小节测试
--3.4.2 小节测试
--3.4.3 小节测试
-3.5振动陀螺仪
--3.5.3 小节测试
-3.6 原子陀螺仪
--3.6.3 小节测试
-第三章 主观题
-4.1加速度计的测量原理
--4.1.3 小节测试
--4.1.5 小节测试
-4.2石英挠性摆式加速度计
--4.2.3 小节测试
-4.3陀螺积分加速度计
--4.3.3 小节测试
-第四章 主观题
-5.1基本概念
--5.1.3 小节测试
-5.2陀螺仪静态误差模型
--5.2.3 小节测试
-5.3加速度计静态误差模型
--5.3.3 小节测试
-5.4惯性仪表误差标定测试
--5.4.3 小节测试
-第五章 主观题
-6.1陀螺稳定平台功能、组成
--6.1.3 小节测试
-6.2陀螺稳定平台工作原理
--6.2.3 小节测试
-6.3陀螺稳定平台性能分析
--6.3.3 小节测试
-6.4平台式惯导系统导航原理
--6.4 知识导授
--6.4.1 小节测试
--6.4.2小节测试
-第六章 主观题
-7.1捷联式惯导系统工作原理
--7.1.3 小节测试
-7.2 四元数及坐标转换
--7.2.3 小节测试
-7.3捷联式惯导系统导航参数解算
--7.3.3 小节测试
-第七章主观题